Hybridation de méthodes
complètes et incomplètes pour la
résolution de CSP
Thèse de doctorat
Spécialité : Informatique
École Doctorale STIM
Sciences et Technologies de l’Information et des MatériauxPrésentée et soutenue publiquement
| Le | 27 Octobre 2006 |
| À | Nantes |
| Par | Tony LAMBERT |
Devant le jury ci-dessous :
| Président : | Jin-Kao Hao, | Professeur à l’Université d’Angers |
| Rapporteurs : | François Fages | Directeur de Recherche, INRIA Rocquencourt |
| | Bertrand Neveu, | Ingénieur en Chef des Ponts et Chaussées, HDR |
| Examinateurs : | Steve Prestwich, | Maître-assistant à l’Université de Cork |
| Directeurs de thèse : | Éric Monfroy, | Professeur à l’Université de Nantes |
| Frédéric Saubion, | Professeur à l’Université d’Angers |
Sommaire
Part I Méthodes de résolution des problèmes de satisfaction de contraintes
1 Les problèmes de satisfaction de contraintes
1.1 Introduction
1.2 Le modèle CSP et ses principales caractéristiques
1.3 Les problèmes d’optimisation sous contraintes
1.4 Exemples de formalisation
1.4.1 Le problème du coloriage de carte
1.4.2 Le placement de reines
1.4.3 Le problème du Zèbre
1.4.4 La règle de Golomb
1.4.5 Les carrés magiques
1.4.6 SEND + MORE = MONEY
1.4.7 Le nombre de Langford
1.4.8 Le voyageur de commerce
1.5 Conclusion
2 Résolution des CSP par des méthodes complètes
2.1 Introduction
2.2 Generate-and-test et backtracking
2.3 Notion de consistance
2.3.1 Consistance de noeud
2.3.2 Consistance d’arc
2.3.3 Consistance hyper-arc
2.3.4 La k-consistance
2.4 Algorithmes de filtrage et propagation de contraintes
2.4.1 Les contraintes globales
2.5 Méthodes de recherche et algorithmes de résolution
2.6 Conclusion
3 Résolution des CSP par des méthodes incomplètes
3.1 Introduction
3.2 La recherche locale
3.2.1 Recherche par voisinage
3.2.2 Algorithmes de recherche locale
3.3 Les algorithmes génétiques
3.4 Conclusion
4 Résolution hybride
4.1 Introduction
4.2 Approches Collaboratives
4.3 Approche intégrative
4.3.1 La recherche locale au secours de l’algorithme complet
4.3.2 Une méthode complète au c ur du voisinage d’une recherche locale
4.4 Conclusion
5 Cadre et algorithme générique pour la propagation de contrainte
5.1 Introduction
5.2 Ordre partiel
5.3 Fonctions et propriétés
5.4 Application aux CSP et domaines composés
5.5 Algorithme générique itératif
5.6 Conclusion
II Cadre théorique uniforme pour la résolution des CSP
6 Introduction de la recherche locale
6.1 Introduction
6.2 Échantillons et voisinage
6.2.1 Échantillonnage et Notion de solution
6.2.2 Ordre sur les échantillons
6.3 Modèle de calcul
6.4 Les solutions
6.5 Fonctions de réduction : définition et propriétés
6.5.1 Réduction de domaines
6.5.2 Découpage de domaines
6.5.3 Le Recherche locale
6.6 La résolution d’un sCSP
6.6.1 Les fonctions de sélection
6.6.2 Réduction de domaine
6.6.3 Découpage
6.6.4 La recherche locale
6.6.5 Exemple de mouvement de recherche locale
6.6.6 Combinaison
6.6.7 Résultat de l’algorithme GI
6.7 Application du modèle de recherche locale pour le Sudoku
6.7.1 Le modèle CSP
6.7.2 Les fonctions
6.7.3 Résultats expérimentaux
6.8 Application du modèle pour une hybridation CP+LS
6.8.1 Fonctions et stratégies
6.8.2 Résultats expérimentaux
6.9 Conclusion
7 Modèle hybride pour les algorithmes génétiques
7.1 Introduction
7.2 Algorithme génétique et population
7.2.1 Populations
7.2.2 Ordre sur les individus, ordre sur les populations
7.2.3 Structure de calculs
7.2.4 Les solutions
7.2.5 Un système à base de fonctions
7.2.6 La résolution sGCSP
7.3 CP+AG pour les problèmes d’optimisation
7.3.1 Instances du problème
7.3.2 Processus expérimental
7.3.3 Résultats expérimentaux
7.4 Conclusion
8 Une formulation hybride des CSP
8.1 Introduction
8.2 Un système hybride pour les CSP
8.2.1 Construction d’un ordre partiel
8.2.2 Fonctions de réduction de domaines
8.2.3 Échantillonnage
8.2.4 Réduire
8.3 Fonction de réduction
8.3.1 La réduction de domaine
8.3.2 Le découpage
8.3.3 La recherche locale
8.3.4 L’évolution
8.4 Conclusion
Introduction Générale
Contexte de travail
La famille des problèmes de satisfaction de contraintes [ Tsang1993, Waltz1975] (Constraint Satisfaction Problems CSP) couvre un grand nombre de problèmes pratiques (planification, ordonnancement, emploi du temps ...) dont de nombreux exemples ont été recensés et catalogués depuis plusieurs décennies (le lecteur pourra consulter, en autres, la CSPLib [ Gent et al. ]). D’un point de vue calculatoire, les problèmes considérés induisent bien souvent des complexités algorithmiques élevées puisque bon nombre d’entre eux relèvent de la classe des problèmes NP-complets [ Garey and Johnson1978, Papadimitriou1994]. Ces problèmes partagent une structure de description commune, basée sur un formalisme très simple, qui autorise une modélisation claire et intuitive. Plus précisément, étant donné un ensemble de n variables X={x1,...,xn} dont les domaines de valeurs respectifs sont dans l’ensemble D={D1,...,Dn} (nous considérons dans cette thèse des domaines discrets), une contrainte quelconque est une relation c ⊆ D1×...×Dn. Un CSP est alors classiquement défini par un triplet (X,D,C) où C est l’ensemble des contraintes. Une solution correspond à une affectation de valeurs aux variables qui satisfait les contraintes et les restrictions imposées par les domaines. On distingue alors les problèmes satisfiables, possédant au moins une solution, et les problèmes insatisfiables. En terme de résolution opérationnelle, plusieurs voies peuvent être envisagées selon que l’on s’intéresse à décider de l’existence d’une solution, à son calcul effectif ou encore au calcul exhaustif de l’ensemble des solutions. Au cours des vingt dernières années, de nombreux algorithmes et systèmes ont été développés pour résoudre les CSP. Classiquement, on identifie deux grandes familles au sein de ces techniques de résolution. D’une part, les méthodes complètes (ou exactes), dont l’objectif est de répondre au problème de décision et donc de prouver la satisfiabilité d’un problème, ou son insatisfiabilité le cas échéant. En général, ces méthodes permettent également d’extraire l’ensemble des solutions d’un problème. D’autre part, les méthodes incomplètes (ou approchées) abordent généralement la résolution d’un CSP comme un problème d’optimisation combinatoire pour lequel il s’agit de calculer une affectation satisfaisant le plus grand nombre de contraintes, l’objectif final étant de les satisfaire toutes. Dans ce cas, on parle aussi de problème de satisfiabilité maximale (MaxCSP) 1. Contrairement aux approches complètes, les méthodes incomplètes ne peuvent pas conclure à l’insatisfiabilité d’un problème. Du point de vue des techniques utilisées, les approches complètes reposent principalement sur une recherche arborescente incluant des notions de consistance locale des contraintes [ Mackworth1992, Mohr and Henderson1986]. Un arbre de recherche permet la construction incrémentale d’affectations, attribuant, à chaque noeud, des valeurs aux variables et testant progressivement la validité des choix effectués vis-à-vis des contraintes. Afin de réduire l’espace de recherche, on utilise généralement la structure et les propriétés de ces contraintes pour élaguer l’arbre ainsi que diverses stratégies de construction et de parcours. Ces techniques sont à la base des systèmes de programmation par contraintes (on pourra se reporter par exemple à [ van Hentenryck1989, Fages1996, Mariott and Stuckey1998, Fruewirth and Abdennadher2003, Dechter2003] pour plus de précisions) concrétisés par de nombreux langages et solveurs (Prolog IV [ Colmerauer1994], Chip [ Aggoun and Beldiceanu1991], Ilog Solver [ ILOG2000], CHOCO [ Laburthe2000]...). Rappelons que la programmation par contraintes a connu ses premiers succès au travers de la programmation logique avec contraintes, paradigme au sein duquel la programmation logique sert de langage hôte pour la formulation du problème et des contraintes [ Jaffar and Lassez1987, Fages1996, Colmerauer1990]. Les approches incomplètes reposent, quant à elles, essentiellement sur l’utilisation d’heuristiques [ Aarts and Lenstra1997, Hao et al. 1999] et particulièrement d’algorithmes basés sur la recherche locale. L’objectif de ces approches est d’explorer l’espace de recherche (dans le cas des CSP, l’ensemble des affectations possible) au moyen d’heuristiques plus ou moins sophistiquées et ce, afin d’en extraire au plus vite une solution. Deux grandes notions sont alors mises en oeuvre. D’un côté, l’intensification consiste à fouiller une zone précise de l’espace afin d’en extraire un optimum local ou mieux, une solution. D’un autre côté, la diversification a pour but de déplacer la recherche dans des zones variées de l’espace. L’efficacité d’une méthode incomplète réside alors dans l’alternance de ces deux phases, gérées au moyen de diverses structures et stratégies, ce qui a donné naissance à la famille des méthodes dites métaheuristiques. Au sein de cette famille, nous distinguerons deux grandes classes qui seront utilisées dans le cadre de nos travaux. D’un côté, les méthodes de recherche locale explorent l’espace de recherche de proche en proche, se déplaçant d’une affectation vers une affectation voisine, guidées par une fonction évaluation (correspondant, par exemple, au nombre de contraintes violées). Divers algorithmes ont alors été proposés [ Kirkpatrick et al. 1983, Glover and Laguna1997, Aarts and Lenstra1997], introduisant des techniques de contrôle afin de garantir un équilibre entre diversification et intensification et une efficacité globale de résolution. Afin de faciliter la conception et l’utilisation de tels algorithmes pour les CSP, on dispose également de bibliothèques spécialisées, telles que EasyLocal++ [ Gaspero and Schaerf2003] mais également de langages dédiés tels que Localizer [ Michel and Hentenryck1997] ou plus récemment Comet [ van Hentenryck and Michel2005]. D’un autre côté, nous trouvons la classe des algorithmes évolutionnistes [ Holland1975b, Goldberg1989b, Michalewicz1996] qui gèrent un ensemble de configurations d’un problème et les font évoluer dans le but d’atteindre une solution. Les mécanismes opérationnels s’inspirent du principe de l’évolution naturelle et, au-delà de cette métaphore, ces méthodes se sont avérées très utiles pour la résolution de problèmes combinatoires complexes (conférences GECCO, PPSN, CEC et EvoCOP). Lorsqu’il s’intéresse à l’utilisation effective de toutes ces méthodes, l’utilisateur se trouve confronté à un dilemme. En effet, si les méthodes complètes présentent davantage de garanties en terme de résultats (preuve d’insatisfiabilité, obtention possible de l’ensemble des solutions), elles trouvent toutefois leurs limites avec l’augmentation de la taille et de la complexité des problèmes considérés. En effet, en particulier dans le cas de problèmes NP-complets, l’explosion combinatoire de l’espace de recherche induit un coût de calcul prohibitif. Dans cas, mais au détriment de la complétude de la résolution, l’utilisateur peut alors se tourner vers les méthodes incomplètes qui ont prouvé leur efficacité en terme de passage à l’échelle. Dans ce contexte, de nouveaux langages et systèmes, tels que le langage Salsa [ Laburthe and Caseau2002], permettent à l’utilisateur de spécifier des algorithmes de recherche globale ou locale, ou encore des algorithmes hybrides. Un très grand nombre de travaux ont été menés sur l’hybridation entre des approches complètes et des méthodes métaheuristiques, en particulier entre programmation par contraintes et recherche locale (citons par exemple [ Jussien and Lhomme2002, Prestwich2000, Pesant and Gendreau1996, Shaw1998]). On pourra se reporter à [ Focacci et al. 2002] pour un panorama plus général. Ces algorithmes, hybridant recherche locale et techniques d’exploration complètes, correspondent souvent à des réponses spécifiques dédiées à des problèmes particuliers. On peut distinguer deux grands types de combinaison au sein de ces algorithmes selon que :- la recherche locale vise à améliorer un algorithme complet : à certains n uds de l’arbre de recherche construit par la méthode complète, une recherche locale est utilisée afin d’atteindre une solution à partir d’une affectation partielle ou bien encore afin d’améliorer une affectation donnée. La recherche locale peut également être envisagée comme outil de réparation.
ou, inversement que
- les méthodes complètes servent à guider la recherche locale : la propagation de contraintes est utilisée pour réduire le voisinage d’un point ou l’espace de recherche dans sa totalité. Les techniques complètes peuvent aussi servir à explorer le voisinage d’un point pour déterminer le prochain mouvement à effectuer lors du processus de recherche locale.
Notons que d’autres travaux combinent par ailleurs algorithmes évolutionnaires et programmation par contraintes [ Madeline2002, Riff Rojas1996, Tam and Stuckey1999]. Ces approches, si différentes qu’elles soient, partagent souvent une même philosophie dans leur conception : un mécanisme est considéré comme le processus maître de la recherche et les autres techniques viennent à son aide comme autant d’heuristiques améliorant ses performances. De ce fait, un tel schéma général rend difficile une réelle coopération entre les différentes approches. Toutefois, les résultats obtenus par les approches hybrides nous poussent de plus en plus à nous tourner vers ce type de démarche pour concevoir des solveurs de plus en plus efficaces, tirant profit de avantages respectifs des méthodes combinées.
Motivations et contributions
Finalement, l’ensemble des techniques que nous venons de décrire est vaste, leurs principes fondamentaux de résolution sont très variés et leurs propriétés diverses. De plus, ces méthodes sont formulées de manières très hétérogènes : algorithmes dédiés, stratégies, propriétés, systèmes plus ou moins génériques ... Il peut donc s’avérer complexe de comprendre précisément leur fonctionnement et d’identifier leurs propriétés afin de bénéficier au mieux de leurs atouts. La nécessité de disposer d’un cadre formel, permettant de décrire et de caractériser les processus opérationnels de ces techniques, se faisait donc réellement sentir. Dans le contexte de la résolution des CSP par des solveurs complets, K. Apt a proposé une formalisation des opérations de réduction des domaines des variables au moyen des propriétés de consistance locale en terme de calcul de point fixe d’un ensemble de fonctions sur une structure ordonnée [ Apt1997, Apt1999, Apt2003]. Dans ce modèle, on itère un ensemble d’opérateurs qui abstraient la structure des contraintes. Ce cadre formel permet de mettre en avant les propriétés principales de ces mécanismes de résolution (convergence et terminaison). Dès lors, en nous basant sur ces travaux, nous avons décidé de les étendre pour prendre en compte un ensemble plus large de techniques de résolution et, en particulier, les méthodes incomplètes. L’objectif d’un tel travail est de permettre une intégration plus homogène de ces paradigmes de résolution afin d’en faciliter la combinaison dans le cadre d’algorithmes de résolution hybrides. Nous avons donc proposé un nouveau cadre basé sur la notion d’itérations chaotiques de fonctions sur un ordre partiel, étendant ainsi les travaux de K. Apt. Ce cadre permet de modéliser de manière uniforme la résolution des CSP par des méthodes complètes (filtrage des domaines des variables, propagation de contraintes et découpe des domaines) et par des méthodes incomplètes (recherche locale et algorithmes génétiques). Nous pouvons alors abstraire les structures et les mécanismes effectifs de la résolution, autorisant ainsi des combinaisons plus homogènes entre les processus. Nous sommes également en mesure de caractériser plus clairement le déroulement et les résultats des processus de résolution hybrides et définir leurs principales propriétés. Enfin, ce cadre peut servir de base au prototypage et à la définition de nouvelles stratégies de résolution et de coopération entre les méthodes. Afin de mettre en avant les atouts de ce nouveau formalisme, nous avons développé un système qui intègre les principaux composants que nous avons définis de manière formelle et permet, au travers d’un algorithme générique, de simuler des stratégies de résolution hybrides variées. Nous présenterons donc un certain nombre de résultats expérimentaux obtenus sur divers jeux d’essai, qui permettent de souligner les atouts et avantages d’une résolution hybride des CSP. Le document s’articule de la manière suivante.Organisation de la thèse
Le manuscrit se décompose en deux parties. La première présente l’état de l’art des méthodes de résolution de CSP. Nous rappelons tout d’abord les notations et les principales caractéristiques d’une modélisation en CSP ainsi que des exemples. Ensuite, la résolution par des méthodes complètes est décrite, introduisant les notions de consistances, de filtrage, de propagation et les algorithmes en faisant usage. Puis, nous présentons la résolution par les méthodes incomplètes, de la recherche locale aux algorithmes génétiques. Après un survol des hybridations existantes entre ces méthodes par collaboration ou intégration, nous présentons le cadre formel proposé par K. Apt pour une modélisation de la propagation de contraintes sur une structure ordonnée. La seconde partie est consacrée à l’extension des travaux de K. Apt pour l’hybridation des méthodes complètes et incomplètes. Nous introduisons tout d’abord la notion d’échantillon qui nous permet par la suite une intégration de la recherche locale au sein d’un modèle hybride. Ce modèle est alors mis en uvre dans diverses expérimentations. Ensuite, nous proposons un cadre pour l’hybridation des algorithmes génétiques et des méthodes complètes pour une application à des problèmes d’optimisation sous contraintes. Enfin, dans un dernier chapitre, nous présentons un cadre général et uniforme des notions vues précédemment avant une conclusion générale qui résumera nos contributions et ouvrira sur des différentes perceptives de recherches.
Part 1
Méthodes de résolution des
problèmes de satisfaction
de contraintes
Chapitre 1
Les problèmes de satisfaction
de contraintes
| Dans ce chapitre, nous présenterons les principales notions liées aux problèmes de satisfaction de contraintes (Constraint Satisfaction Problem CSP) qui sont au c ur de cette thèse. Des exemples de problèmes sous forme CSP illustrent le formalisme. |
1.1 Introduction
Beaucoup de problèmes issus de l’Intelligence Artificielle (IA)
ainsi que d’autres branches de l’informatique peuvent être
modélisés comme des problèmes de satisfaction de contraintes (CSP)
[ Nadel1990]. Nous trouvons des exemples en conception de
scènes en 3D [ Chakravarthy1979, Davis and Rosenfeld1981], en maintien de la
cohérence [ Dechter1987, Dechter and Dechter1988, Croker and Dhar1993], en
ordonnancement
[ Dhar and Ranganathan1990, Fox1987, Fox et al. 1989, Petrie et al. 1989, Prosser1989, Rit1986],
en raisonnement temporel
[ Allen1983, Allen1984, Dechter et al. 1991, Vilain and Kautz1986, Tsang1987], en théorie des
graphes [ McGregor1979, Bruynooghe1985], en architecture
[ Eastman1972], en planification d’expérimentations génétiques
[ Stefik1981], en conception de circuit
[ de Kleer and Syssman1980], en conception et fabrication de machines
[ Frayman and Mittal1987, Navinchandra1991], ou encore en raisonnement
diagnostique [ Geffner and Pearl1987]. La modélisation d’un problème
sous forme de CSP se révèle souvent souvent pratique et intuitive.
Dans ce qui suit nous rappellerons les notations, les définitions
liées à ce formalisme ainsi que des exemples de son utilisation.
1.2 Le modèle CSP et ses principales caractéristiques
Un problème de satisfaction de contraintes (CSP) est généralement présenté sous la forme d’un ensemble de variables, auxquelles sont associés des domaines, ainsi qu’un ensemble de contraintes. Chaque contrainte est définie sur un sous-ensemble de l’ensemble des variables et limite les combinaisons de valeurs que peuvent prendre ces variables. La résolution d’un CSP consiste à trouver une affectation de valeur pour chaque variable de telle sorte que l’ensemble des contraintes soit satisfait. Pour certains problèmes, le but est de trouver toutes ces affectations. Nous allons par la suite présenter non pas le cadre général, mais nous restreindre à des domaines finis de valeurs discrètes. Cette limitation se traduit dans les exemples présentés et, nous verrons par la suite, se justifie par des expérimentations pour des problèmes à domaines finis. Définition 1 [Problème de satisfaction de contraintes] Un problème de satisfaction de contraintes (CSP) [ Tsang1993] est défini par un triplet (X,D,C) où:
- X = { x1,..., xn} est l’ensemble fini des n variables du problème,
- D = {Dx1,...,Dxn} est l’ensemble des n domaines finis pour les variables. Dxi est l’ensemble des valeurs possibles pour la variable xi,
- C = {c1,...,cm} est l’ensemble des m contraintes.
|
- unaire si son arité est égale à 1,
- binaire si son arité est égale à 2,
- n-aire si son arité est égale à n.
| Exemple (CSP simple) : |
Nous pouvons, par exemple, définir un problème
simple sous forme de CSP (X,D,C) avec :
|
Étant donné un CSP (X,D,C), sa résolution consiste à affecter des valeurs aux variables, de telle sorte que toutes les contraintes soient satisfaites. On introduit pour cela les notations et définitions suivantes. Définition 4 [Affectation] Soit un CSP (X,D,C), on appelle affectation le fait d’instancier certaines variables par des valeurs (prises dans leurs domaines respectifs). Une affectation est une fonction :
|
|
|
A chaque CSP P = (X, D, C) peut être associé, pour les contraintes binaires, un graphe des contraintes (ou graphe associé) obtenu en représentant chaque variable du réseau par un sommet et chaque contrainte binaire qui porte sur les variables xi et xj, notée cij ∈ C par une arête entre les sommets xi et xj. Dans le cas des CSP à avec des contraintes n-aires, on peut utiliser la représentation par hyper-graphe, en remplaçant les arêtes par des hyper-arêtes. Le graphe des contraintes permet d’avoir un rendu graphique du problème ; il se trouve ainsi être parfois l’intermédiaire entre le problème réel et sa transcription dans le formalisme CSP. C’est le cas par exemple pour le problème de coloriage de graphe qui sera présenté dans la section suivante.
1.3 Les problèmes d’optimisation
sous contraintes
Un problème d’optimisation sous contraintes consiste à trouver une
solution optimale parmi l’ensemble des solutions réalisables (i.e
qui ne violent pas de contraintes). Le problème est alors double,
nous avons : d’une part une recherche des solutions réalisables et
d’autre part une recherche d’une solution optimale. Une fonction,
appelée fonction objectif, est définie selon le problème posé pour
évaluer la qualité d’une affectation. Cette fonction associe à
chaque instanciation une valeur, l’objectif est alors de trouver
l’affectation qui minimise ou maximise cette fonction.
Définition 8 [Problème d’optimisation sous contraintes]
Étant donné un CSP P = (X,D,C), notons S
l’espace de recherche défini par les domaines de D.
Soit (K, < ) avec K un ensemble totalement
ordonné par la relation stricte < et f une fonction de coût,
aussi appelé fonction objectif de S vers K :
|
|
1.4 Exemples de formalisation
Comme suggéré en début de chapitre, une multitude de problèmes se modélisent sous forme de CSP. Dans ce qui suit nous rappellerons des problèmes simples, i.e., académiques.
1.4.1 Le problème du coloriage
de carte
Le problème de coloriage de carte, cas spécial du coloriage de graphe, peut se modéliser sous forme de CSP. Dans ce
problème, nous devons colorier (avec un ensemble de couleurs
donné) chaque région d’une carte, c’est à dire d’un graphe
planaire, de telle manière que deux régions adjacentes n’aient pas
la même couleur.
La figure 1.1 montre un exemple de problème du
coloriage de carte et son équivalent CSP sous la forme du graphe
des contraintes. La carte comporte quatre régions devant être
coloriées en rouge, bleu ou vert. Le CSP équivalent a une variable
pour chacune des quatre régions. Le domaine de chaque variable
correspond à l’ensemble des couleurs. Pour chaque paire de régions
adjacentes, une contrainte binaire est créée entre les variables
correspondantes. Cette contrainte interdit toute affectation
identique de ces deux variables.
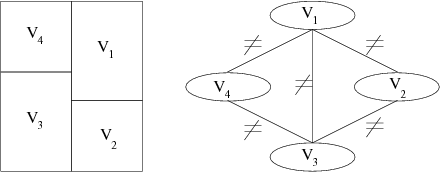
- X = {V1,V2,V3,V4}
- D = { DV1,DV2,DV3,DV4} avec DVi = {Rouge, Vert, Bleu}
- C = { V1 ≠ V2 ; V1 ≠ V4 ; V2 ≠ V3 ; V3 ≠ V4}
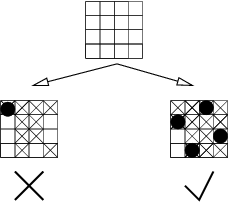
1.4.2 Le placement de reines
Le problème des n reines consiste à placer n reines sur un
échiquier n ×n de sorte qu’aucune reine ne soit en prise
avec une autre. Ceci revient à placer au plus une reine par ligne,
par colonne et par diagonale.
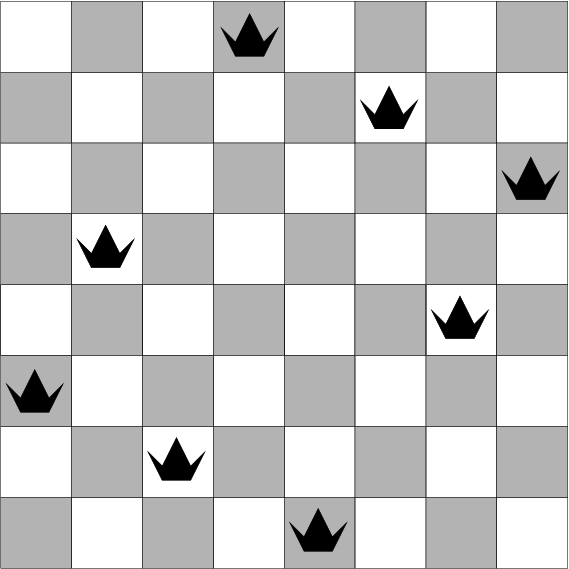
- X = {x1,x2, ..., xn}
- D = { Dx1,Dx2,..., Dxn } avec Dxi = {1,2,...,n}
- C est défini par, ∀i, ∀j : les reines doivent être sur des lignes différentes xi ≠ xj, les reines doivent être sur des diagonales différentes xi +i ≠ xj +j, xi - i ≠ xj - j
1.4.3 Le problème du Zèbre
Le problème du Zèbre est un puzzle logique qui figure lui aussi
parmi les classiques du
genre, il se pose comme suit : Cinq maisons de couleurs différentes sont habitées par cinq personnes de nationalités distinctes, ces personnes ont leurs boissons préférées, leurs animaux domestiques et leurs sports pratiqués eux aussi différents. Les informations dont nous disposons sont les suivantes :
- l’anglais habite la maison rouge,
- l’espagnol a un chien,
- la personne dans la maison verte boit du café,
- l’irlandais boit du thé,
- la maison verte est à droite de la maison ivoire,
- le joueur de Go possède un escargot,
- la personne dans la maison jaune joue au cricket
- la personne dans la maison du milieu boit du lait,
- le nigérien habite la première maison,
- le judoka habite à côté de la personne qui a un renard,
- le joueur de cricket est à côté de celui qui a un cheval,
- le joueur de poker boit du jus d’orange,
- le japonais joue au polo,
- le nigérien habite à côté de la maison bleue.
Le problème est modélisé en numérotant les maisons de gauche à droite, de 1 à 5. Chaque couleur, personne, chose, animal, sport, boisson constitue une variable dont le domaine contient initialement les nombres de 1 à 5. Ainsi, si la couleur bleue est instanciée par la valeur 3, cela signifie que la maison 3 est bleue. Soit la liste des variables de taille 5 suivante, rangées par catégorie :
- Anglais, Espagnol, Irlandais, Nigérien, Japonais,
- Rouge, Verte, Bleue, Ivoire, Jaune,
- Chien, Escargot, Renard, Zèbre, Cheval,
- Judo, Go, Cricket, Poker, Polo
- Lait, Guinness, Café, Thé, Jus,
- Anglais = Rouge,
- Espagnol = chien,
- Verte = Café
- Irlandais = Thé,
- Verte = Ivoire + 1
- Go = Escargot,
- Cricket = Jaune,
- Lait = 3,
- Nigérien = 1,
- | Judo - Renard | = 1,
- | Cricket - Cheval | = 1,
- Poker = Jus,
- Polo = Japonais
- | Nigérien - Bleue | = 1,
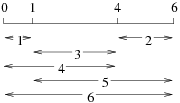
1.4.4 La règle de Golomb
Le problème de Golomb consiste à placer N marques sur une règle
pour que toutes les distances entre les marques soient
différentes, la figure 1.3 illustre le placement de
quatre marques.
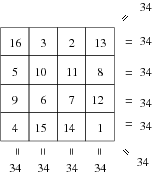
1.4.5 Les carrés magiques
Un carré magique d’ordre n est une matrice de n×n
contenant tous les nombres de 1 à n2 placés pour que chaque
ligne, chaque colonne et les deux diagonales aient la même somme.
1.4.6 SEND + MORE = MONEY
Ce puzzle de cryptarithmétique consiste à retrouver les chiffres
cachés derrière les lettres de cette addition 1.5.

| 1000 ×S + 100 ×E + 10 ×N + D | |
| + | 1000 ×M + 100 ×O + 10 ×R + E |
| = | 10000 ×M + 1000 ×O + 100 ×N + 10×E + Y |
Une formulation en CSP de ce problème peut considérer chaque lettre S, E, N, D, M, O, R, Y comme une variable. Á chaque variable, les valeurs possibles correspondent aux chiffres de 0 à 9 et l’objectif est donc de trouver la valeur de chaque variable pour satisfaire l’addition.
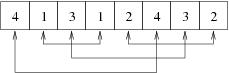
1.4.7 Le nombre de Langford
Ce problème consiste à placer deux ensembles de chiffres (de 1 à
4) dans un certain ordre de sorte que les 2 1 soient
séparés par un chiffre, les 2 2 , par 2, etc.
Le problème se généralise alors sous la forme LN(k,n), avec k
ensembles comportant chacun les nombres de 1 à n.

- | x1 - x2 | = 2
- | x3 - x4 | = 3
- | x5 - x6 | = 4
- | x7 - x8 | = 5
- x1 ≠ x2 , x1 ≠ x3, x1 ≠ x4, x1 ≠ x5 , x1 ≠ x6 , x1 ≠ x7 , x1 ≠ x8 , x2 ≠ x3 , x2 ≠ x4 , x2 ≠ x5 , x2 ≠ x6 , x2 ≠ x7 , x2 ≠ x8 , x3 ≠ x4 , x3 ≠ x5 , x3 ≠ x6 ,x3 ≠ x7 , x3 ≠ x8 , x4 ≠ x5 , x4 ≠ x6 , x4 ≠ x7 , x4 ≠ x8 , x5 ≠ x6 , x5 ≠ x7 , x5 ≠ x8 ; x6 ≠ x7 ; x6 ≠ x8 ; x7 ≠ x8
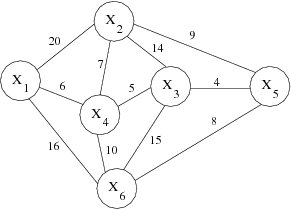
1.4.8 Le voyageur de commerce
Un exemple classique d’optimisation sous contraintes est celui du
voyageur de commerce, celui-ci doit traverser n ville,
l’objectif est donc de trouver le meilleur chemin, le plus court,
passant par ces villes (voir figure 1.8). Le
problème se modélise en CSP de manière intuitive avec n ville et
les distances entre les villes notées δxi,xj
(distance entre la ville i et et la ville j) :
- X = {x1,x2, ..., xn}
- D = { Dx1,Dx2,..., Dxn } avec Dxi = {1,2,...,n}
- C est défini par, une contrainte AllDiff(x1,...,xn) traduisant le fait que nous devons passer une seule fois par ville et par toutes les villes.
- f = min(åi=1n-1 δxi,xi+1)
1.5 Conclusion
Ce premier chapitre nous a permis d’introduire la notion de CSP et
de souligner la simplicité de ce formalisme. Nous avons vu qu’un
grand nombre de problèmes variés correpondent à des problèmes de
satisfaction de contraintes.
Au travers des exemples, nous avons énoncé différents types de contraintes. Les contraintes
arithmétiques avec des équations et inéquations mais aussi une
contrainte globale. Outre la contrainte Alldiff, qui épargne
l’écriture d’un ensemble d’inégalités, on retrouve dans cette
catégorie, à titre d’exemple, les contraintes globales de
cardinalité de type AtMost ou AtLeast.
Évidemment, un algorithme capable d’énumérer toutes les
combinaisons possibles permet de résoudre tous les problèmes
formulés en CSP, encore faut-il que le problème soit suffisamment
petit pour que le programme termine en temps raisonnable, ce qui
bien souvent n’est pas le cas. Dans les chapitres suivants, nous
allons aborder les techniques de résolution de CSP.
Chapitre 2
Résolution des CSP par
des méthodes complètes
|
2.1 Introduction
La définition donnée d’un CSP permet de représenter un grand
nombre de problèmes, comme rappelée au chapitre 1.2,
et il n’existe pas de méthode universelle pour une résolution
efficace. Diverses techniques ont été mises au point, notamment en
utilisant les notions de consistance, que nous allons développer
dans ce chapitre, ainsi que des combinaisons de ces méthodes pour
former des algorithmes de résolution.
Étant donné un CSP, un solveur a pour objectif de fournir les
solutions satisfaisant les contraintes dans la mesure où cela est
possible. Les propriétés des solveurs peuvent s’énoncer ainsi :
- Un solveur est complet s’il est toujours capable de répondre par vrai ou faux concernant l’existence d’une solution.
- Un solveur est correct s’il ne calcule que des solutions.
- Un solveur est fiable s’il calcule toutes les solutions pour un problème donné.
2.2 Generate-and-test et backtracking
Une méthode simple pour la résolution des CSP est de générer toutes les configurations possibles, c’est à dire toutes les combinaisons possibles de valeurs des variables et de tester si elles vérifient les contraintes : auquel cas elles sont solutions. Cette approche est connue sous le nom de Generate-and-test. Le nombre de possibilités testées est alors le cardinal du produit cartésien des domaines des variables, ce qui pour les problèmes de grandes tailles devient impossible à envisager. Le backtracking est sans nul doute la méthode la plus répandue pour une recherche systématique. Pour cette méthode, les variables sont instanciées les unes après les autres et ce jusqu’à obtenir une affectation complète. Seulement, contrairement à un generate-and-test, cette méthode teste la faisabilité à chaque étape de la résolution, c’est-à-dire que pour chaque instanciation de variables, les contraintes dont les variables sont déjà instanciées sont vérifiées, sur l’affectation partielle courante . Ainsi, lorsqu’à une étape donnée, l’affectation partielle courante viole une contrainte, le backtracking supprime le sous-espace de recherche en dessous du point de choix.
2.3 Notion de consistance
Comme notre objectif est de trouver une affectation pour chaque variable satisfaisant toutes les contraintes, l’idée est alors de réduire l’espace de recherche (l’espace des possibilités). Pour ce faire, les algorithmes de résolution complets vont essayer de supprimer certaines valeurs dans les domaines, des valeurs dites inconsistantes. Une valeur est jugée inconsistante dans la mesure où elle n’est pas validé pour une ou plusieurs contraintes. Une notion de consistance est donc à associer à la notion de contrainte. En effet, une contrainte force les variables à ne prendre que certaines valeurs, la consistance intervient là où des valeurs d’un domaine ne pourront en aucun cas satisfaire cette contrainte. La propriété de consistance pour une contrainte est atteinte lorsque plus aucune valeur ne peut être supprimée. On considérera ici des propriétés de consistance locale, c’est-à-dire une consistance considérant chaque contrainte de manière indépendante. Plusieurs formes de consistances sont alors à définir en fonction des caractéristiques des contraintes, c’est pourquoi, nous verrons dans un premier temps, les contraintes ne portant que sur une seule variable, avec les consistances de noeud, puis les contraintes à deux variables avec les consistances d’arc et enfin les consistances hyper-arc et la k-consistance pour les contraintes n-aires.
2.3.1 Consistance de noeud
Commençons cet examen des consistances par la consistance de n
ud, celle-ci ne concerne que les contraintes unaires. Ce sont les
contraintes les plus simples, car elles n’affectent qu’une seule
variable.
Définition 9 [Consistance de noeud]
On dit qu’un CSP est consistant de noeud si pour chaque variable
x ∈ X, toute contrainte unaire partant sur x, coïncide avec
le domaine de x. Soit un CSP (X,D,C) et c ∈ C :
|
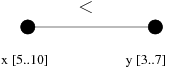
|
- X = { x1,...,xn}
- D = {Dx1,...,Dxn} avec ∀i ∈ [1..n] Dxi = [1..10]
- C = {x1 ≥ 2,...,xn ≥ 2}
2.3.2 Consistance d’arc
De manière informelle, une contrainte binaire est consistante
d’arc si chaque valeur de chaque domaine appartient à au moins une
paire de valeurs consistantes définie par la contrainte. On parle
alors de CSP arc consistant si toutes ses contraintes binaires
sont arc consistantes.
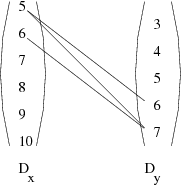
Définition 10 [Consistance d’arc]
Soit un CSP (X,D,C), soit une contrainte binaire c ∈ C portant sur les variables
x et y avec leur domaine respectif Dx et Dy, telle que
c ⊆ Dx ×Dy. Nous dirons que c est arc
consistante si :
- ∀a ∈ Dx, ∃b ∈ Dy, (a,b) ∈ c;
- ∀b ∈ Dy, ∃a ∈ Dx, (a,b) ∈ c.
 |  |
2.3.3 Consistance hyper-arc
La notion de consistance hyper-arc généralise celle d’arc pour les
contraintes n-aires.
Définition 11 [Consistance hyper-arc]
Soit un CSP (X,D,C), et une contrainte c ∈ C portant sur les variables
x1, x2,...,xn avec leur domaine respectif Dx1,Dx2,...,Dxn de sorte que c ⊆ Dx1 ×Dx2 ×... ×Dxn. On dit alors que c est
hyper-arc consistante si pour chaque i ∈ [1..n] et a ∈ Dxi, il existe un n-uplet d dans c de sorte que la i-ième
composante de d soit égale à a.
Un CSP est hyper-arc consistant si toutes ses contraintes sont
hyper-arc consistantes.
Une des faiblesses des consistances présentées est qu’elles
considèrent les contraintes de manière isolée les unes des autres,
ce qui leur confère l’aspect local, alors que dans la plupart des
cas, elles partagent des variables.
2.3.4 La k-consistance
La k-consistance correspond à une généralisation des différentes
notions vues jusqu’à présent et se définit ainsi :
Définition 12 [k-consistance]
Soit s une instanciation partielle de longueur k, i.e. k
variables sont instanciées pour un CSP (X,D,C),
si s satisfait toutes les contraintes, on dit alors que
l’affectation est k-consistante.
Définition 13
Soit un CSP P, si pour toutes affectations partielles
(k-1)-consistantes, pour chacune des autres variables non
instanciées, il existe une valeur de leur domaine qui étend la
consistance en une k-consistance, alors le CSP est dit
k-consistant.
Un algorithme permettant d’établir la k-consistance a été présenté
en 1989 par [ Cooper1989]. Nous pouvons donc faire correspondre
cette notion avec les précédentes en appelant un CSP 1-consistant
s’il est consistant de noeud, 2-consistant s’il est consistant
d’arc.
2.4 Algorithmes de filtrage et propagation de contraintes
Nous avons présenté les propriétés de consistances et maintenant nous allons voir en quoi ces propriétés peuvent être utilisées pour la résolution des CSP par les méthodes complètes. Différents algorithmes sont définis pour assurer la consistance. En introduisant les notions de consistance, il va de soi de présenter les algorithmes associés. L’objectif est alors d’atteindre la propriété de consistance locale en utilisant, en outre, la propagation de contraintes et le filtrage. Atteindre la propriété de consistance locale, pour un problème donné, simplifie la résolution en réduisant l’espace de recherche. Nous nous intéressons ici à des algorithmes complets, c’est à dire capables de nous répondre si le problème est insatisfiable. Le filtrage des valeurs inconsistantes est utile pour instancier les variables et permet de retirer certaines valeurs des domaines tout en conservant les solutions. Les différents algorithmes de filtrages reposent bien sûr sur le type des contraintes exprimées. L’objectif est de réduire les domaines pour rendre les CSP consistants relativement aux propriétés de chaque contrainte. L’algorithme associé aux contraintes unaires (procédure 1) est relativement simple, il se réduit à supprimer l’ensemble des valeurs ne satisfaisant pas la contrainte. [!hbt]
#1Consistance de n ud() Pour atteindre la consistance d’arc, il est nécessaire de vérifier les couples de valeurs possibles. La procédure Révise_arc, extraite de [ Mackworth1977], permet d’atteindre pour un arc donné, la propriété de consistance. [!hbt] #1Révise_arc(Vi,Vj) Soit Supp un Booleen
Supp ← Faux
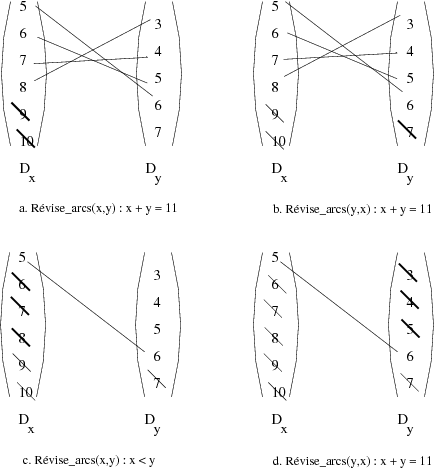
En ce qui concerne les contraintes binaires, pour faire en sorte que chaque arc soit consistant, une seule application de la procédure révise est insuffisante. En effet, la suppression d’une valeur d’un domaine pour une contrainte donnée peut avoir des répercussions sur les autres contraintes sur ce domaine. Exemple : Révise_arc Pour l’exemple 2.2 considérons une deuxième contrainte. Rappelons que le CSP est défini par deux variables x, y avec Dx = [5..10] et Dy = [3..7]. Les contraintes sont c1 : x > y et nous ajoutons c2 : x+ y = 11. Le résultat de l’application des procédures Révise_arc est présenté par la figure 2.3. Nous remarquons dans cet exemple que la suppression de valeurs par c1 en c. entraîne une autre application de la procédure pour c2 en d. pour l’arc y,x bien qu’il soit déjà étudié en b.
Q ← {(Vi,Vj) ∈ arcs(G), i ≠ j};
Soit CHANGE un Booleen
[!hbt] #1AC-3() Soit Q l’ensemble des arcs du graphe des contraintes G;
Q ← {(Vi,Vj) ∈ arcs(G), i ≠ j};
Soit CHANGE un Booleen
2.4.1 Les contraintes globales
Le filtrage des valeurs par arc-consistance est souvent insuffisant car il ne tient pas compte des liens existant entre les contraintes. Pour être plus efficace, des contraintes globales ont été introduites, celles-ci parfois correspondent à es conjonctions de plusieurs contraintes. Un algorithme de filtrage est alors dédié à la contrainte pour un meilleur filtrage. La première et la plus célèbre est la contrainte globale de type Alldiff (conjonction de contraintes de différence), une procédure permet de filtrer les domaines à condition qu’au moins un domaine se résume à une seule valeur. Exemple : CSP avec contrainte Alldiff
Considérons le CSP (X,D,C) où:
- X = { x1, x2, ,x3}
- D = {Dx1,Dx2,Dx3} avec Dx1 = {1}, Dx2 = {1;2} et Dx3 = {2;3}
- C = { AllDiff(x1,x2,x3)}
Les avantages apportés par une modélisation avec des contraintes globales ne se limitent pas à des procédures de filtrage spécifiques. On retrouve également des procédures de vérification capables de prouver l’inconsistance d’un problème (voir exemple 4). Exemple Vérification pour AllDiff
Considérons le CSP (X,D,C) avec :
- X = { x, y , z}
- D = {Dx,Dy,Dy} avec Dx = Dy = Dx = {1;2}
- C = { x ≠ y , x ≠ z , y ≠ z }
2.5 Méthodes de recherche et algorithmes de résolution
Après avoir présenté le backtrack, le filtrage et la
propagation de contraintes, nous sommes en mesure de définir des
algorithmes complets pour la résolution de CSP.
Dans un premier schéma, la résolution se résumait à instancier les
variables les unes après les autres tout en testant si elles ne
violent pas de contraintes. Nous pouvons à présent utiliser les
consistances et propager pour réduire l’espace vers un problème
plus simple à résoudre à chaque n ud et ainsi limiter les
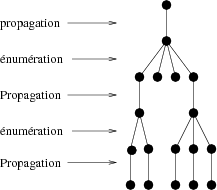
points de choix. En général, un algorithme de backtrack standard
en profondeur d’abord est appliqué avec, à chaque n ud de
l’arbre de recherche, une propagation de contrainte à des niveaux
plus ou moins élevés selon les méthodes (voir figure
2.4) et comme aucune solution n’est perdue
pendant la recherche, la résolution reste complète. Le backtrack a
pour but une énumération des valeurs des variables (voir chapitre
2.2) avec à chaque étape un choix a effectuer sur la
variable qui sera énumérée ainsi que sur les valeurs choisies.
2.6 Conclusion
Nous avons vu que les propriétés des contraintes sont utiles pour
réduire l’espace de recherche, et que le backtrack et les
propriétés de consistance locale permettent une résolution
complète d’un problème.
Par une propagation des contraintes (à des degrés différents) et différentes
stratégies de parcours de l’arbre de recherche (le plus commun
étant en profondeur d’abord), un simple backtracking se transforme
alors en un solveur parfois assez complexe. Seulement ce mode de
résolution semble atteindre ses limites pour certains problèmes où
les contraintes ne permettent pas de réduire un espace de
recherche de manière significative et où un parcours complet de
l’arbre des possibilités, malgré le filtrage, semble dès lors
impossible. C’est dans ce contexte que les méthodes dites
incomplètes ont émergé et feront l’objet du chapitre suivant.
Chapitre 3
Résolution des CSP par
des méthodes incomplètes
| Les méthodes incomplètes (telles que la recherche locale (LS) [ Aarts and Lenstra1997]) reposent sur des heuristiques permettant d’étudier des zones spécifiques de l’espace de recherche dans le but d’atteindre une solution. Ce chapitre propose un panorama non exhaustif de ces méthodes. |
3.1 Introduction
L’utilisation de métaheuristiques est apparue comme une issue face
à des problèmes combinatoires dont les espaces de recherche
explosent en taille. Pour les problèmes NP-difficiles, en
admettant que P ≠ NP, il n’existe pas d’algorithme en temps
polynomial et donc une résolution complète entraîne un temps de
calcul exponentiel dans le pire des cas. Le développement récent
de ces méthodes témoigne d’une part de l’intérêt que nombre de
chercheurs y portent, mais aussi du potentiel de ces paradigmes de
résolution. Les métaheuristiques sont basées sur deux concepts
majeurs :
- l’intensification consiste à fouiller une zone réduite de l’espace de recherche pour en extraire éventuellement une solution,
- et la diversification qui permet à la recherche de se déplacer dans l’espace plus largement.
3.2 La recherche locale
Nombre de méthodes sont apparues combinant différentes
heuristiques, ces combinaisons sont appelées métaheuristiques
(dérivé du verbe grec heuriskein εuriskεin signifiant
rechercher et du suffixe méta pour au niveau
supérieur, au-delà de ). Ces méthodes considèrent l’espace de
recherche dans sa totalité, l’ensemble des affectations possibles
des variables. L’idée est donc, de ne pas visiter toutes ces
configurations, mais de se doter d’heuristiques pour choisir les
zones d’exploration. Les méthodes présentées correspondent à des
schémas généraux qui leur confèrent le statut de métaheuristiques.
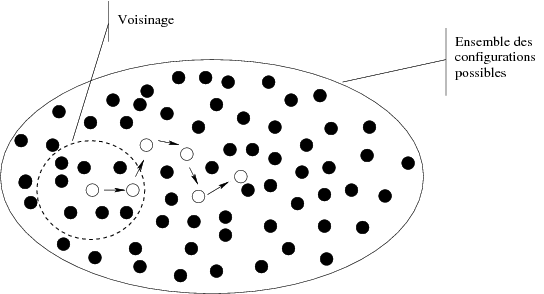
3.2.1 Recherche par voisinage
Le principe de base d’une recherche locale est de partir d’une
configuration initiale (d’une affectation complète) et par un
processus itératif, de remplacer la configuration courante par une
meilleure prise dans ce qui est défini comme son voisinage. L’idée
est donc d’être capable, si on améliore une configuration
progressivement, d’atteindre une solution. En se déplaçant de
proche en proche (s0 → s1 → ...) dans l’espace de
recherche, la configuration courante est progressivement corrigée
de ses défauts (dans notre contexte il s’agit de contraintes non
satisfaites). Le voisinage représente des affectations autour de
la configuration courante, accessibles en modifiant certains
attributs (valeurs des variables) et est très souvent relatif au
problème posé. Le voisinage se définit généralement comme suit :
Définition 14 [Voisinage]
Soit S un espace de recherche (appelé aussi espace des
configurations), un voisinage est une fonction :
|
|
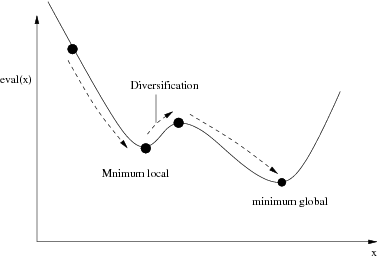
Soit x une configuration initiale prise aléatoirement
Le processus de descente simple se limite à une zone de recherche et ne permet pas de sortir des optimums locaux (figure 3.2).
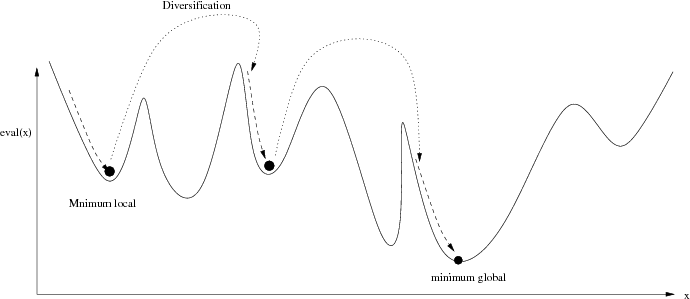
Soit x’ une configuration initiale et
x la meilleure solution trouvée avec eval(x) ← ∞
3.2.2 Algorithmes de recherche locale
Les algorithmes présentés sont à considérer comme des stratégies
guidant la recherche basées sur le principe de voisinage,
d’évaluation et de l’alternance des deux phases, à savoir
intensification et diversification.
Le Recuit Simulé Simulated Annealing
Le recuit simulé est considéré comme la première métaheuristique pourvue d’une stratégie pour échapper aux minimums locaux. Son origine se trouve dans la description des phénomènes physiques en métallurgie. C’est dans [ Kirkpatrick et al. 1983] que ce processus est exploité pour la première fois pour la résolution des problèmes d’optimisation. Le principe de cette méthode est d’autoriser les déplacements vers des configurations de qualité moindre (que la courante) sous certaines probabilités. L’algorithme 3.3, dans ses grandes lignes, commence par s’initialiser avec une configuration complète et un paramètre température T. Pendant la recherche, la température T décroît selon une fonction de refroidissement qui influe sur les conditions d’acceptation d’une configuration en fonction de la dégradation qu’elle induit. Au début de la recherche, les configurations plus mauvaises sont acceptées facilement, en revanche au fur et à mesure que la recherche avance, la température T décroît ce qui réduit les chances d’acceptation pour une affectation de qualité moindre et permet d’assurer entre autre une certaine convergence de l’algorithme. #1Recuit SimuléSoit x une configuration initiale
Soit T une fonction de refroidissement et T une température initiale
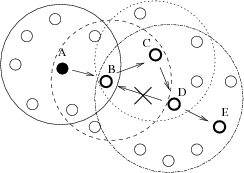
Recherche Tabou
L’idée de base d’une recherche tabou a été introduite par [ Glover1986] sur des intuitions déjà présentes dans [ Glover1977]. Cette méthode est sans doute la plus populaire des métaheuristiques. Elle se base sur une descente avec sélection du meilleur voisin et sur une mémoire à court terme des précédentes configurations rencontrées, pour éviter les cycles (algorithme 3.4). Une liste est alors maintenue pour conserver la trace des affectations visitées et en interdire un nouveau passage. L’unique paramètre est la longueur l de cette liste. #1Recherche tabouSoit x une configuration initiale
Soit l une liste tabou dont la taille maximale est k
Dans la figure 3.4 la recherche débute en un point A de l’espace de recherche, quand la configuration D est atteinte, le mouvement de retour sur B est interdit ce qui contraint la recherche tabou à se diriger vers E en second choix.
3.3 Les algorithmes génétiques
Basés sur le principe de la sélection naturelle, les
algorithmes génétiques [ Goldberg1989a, Holland1975a] ont été appliqués
avec succès aux problèmes combinatoires tels que les problèmes
d’ordonnancements ou de transports.
Le principe fondamental de cette approche est basé sur le fait que
les espèces évoluent par adaptations à un environnement changeant
et que le savoir acquis est inclus dans la structure de la
population et de ses membres, codé dans leurs chromosomes. Les
algorithmes évolutionnaires sont donc principalement basés sur la
notion d’adaptation des individus d’une population, cette
population évolue comme dans la théorie darwinienne, par des
générations successives. Chaque nouvelle génération est
généralement créée à partir de la précédente grâce à des
opérateurs d’évolution comme le croisement de deux individus ou la
mutation sur un gène d’un individu. Si des individus sont
considérés en tant que solutions potentielles d’un problème donné
(généralement un individu correspond à une affectation),
l’application d’un algorithme génétique consiste en la génération
successive de meilleurs individus. L’objectif est d’améliorer la
qualité des individus, mesurée par une fonction d’évaluation, en
faisant du croisement, une concaténation des meilleurs gènes des
parents et de la mutation une amélioration de l’individu. Nous
renvoyons le lecteur à [ Michalewicz1996] pour plus de détails.
Les populations
Un algorithme génétique comprend comme composant de base une population, c’est-à-dire un ensemble d’individus correspondant à une représentation des solutions potentielles. Dans la plupart des cas, un individu est un chromosome défini par ses gènes. Dans notre cas, un individu est une affectation de valeurs aux variables. Il est donc nécessaire que l’algorithme se dote d’un mécanisme de création d’une population initiale.L’évaluation
Un autre élément à définir lorsque l’on conçoit ce type d’algorithme est la fonction d’évaluation. Cette fonction, que nous notons eval, évalue chaque solution potentielle selon le problème donné. Dans le cas des CSP cette fonction évalue le nombre de contraintes violées.Les opérateurs génétiques
Les opérateurs génétiques définissent la génération des enfants pour la création de la population suivante. Deux opérateurs différents :- le croisement produit de nouveaux individus (les
descendants) en croisant des individus de la population courante
(les parents). Un exemple de croisement est donné en figure
3.5, il représente un croisement uniforme qui, à
partir de deux parents x et y, créé un nouvel individu
résultat de la recombinaison des gènes et qui sera ensuite inséré
dans la population.
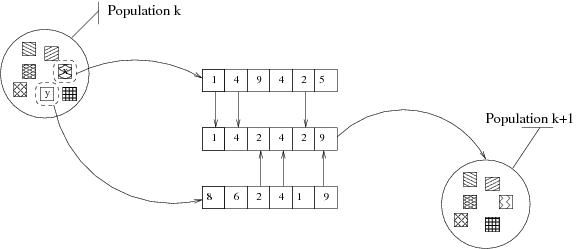
Figure 3.5: Exemple de croisement uniforme
- la mutation, change arbitrairement un ou plusieurs
gènes d’un individu choisi. La figure 3.6 nous montre
comment, depuis un individu sélectionné dans une population k,
un gène est muté dans k+1. Les mutations sont généralement
utiles pour apporter de nouvelles informations. On peut très bien
imaginer que, dans notre exemple, la valeur 8 n’apparaît dans
aucun individu de la population k. La mutation dans ce cas
introduit cette valeur et donc, ouvre la possibilité à de
nouvelles configurations.
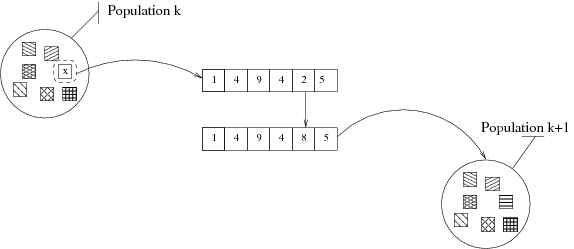
Figure 3.6: Exemple de mutation sur un gène
La sélection
Un dernier principe de base à définir est la sélection d’individus. L’objectif est de ne conserver que les meilleurs individus afin d’assurer une convergence globale. Nous pouvons retrouver ici le principe d’élitisme qui consiste à sélectionner la ou les meilleures configurations. Toutefois, cette opération de sélection se doit de préserver une certaine diversité dans la population, on y retrouve alors la mesure d’entropie pour une meilleure répartition des individus dans l’espace de recherche. Que ce soit pour la mutation ou pour le croisement, une sélection doit avoir lieu, dans la figure 3.7 des individus sont sélectionnés pour être soumis aux opérateurs de croisement ou mutation. De même, un ensemble d’individus est choisi pour constituer une nouvelle génération.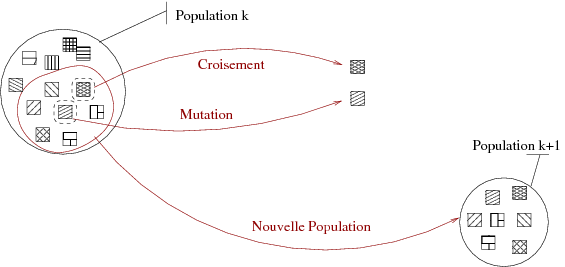

3.4 Conclusion
Nous avons présenté les algorithmes pour les méthodes de
recherches locales ainsi que le principe général qui régit un
algorithme à base de population. Toutes ces méthodes s’appliquent
à un grand nombre de problèmes différents et une métaheuristique
constitue en quelque sorte un cadre qui s’adapte au problème posé.
L’univers des méthodes incomplètes est vaste, beaucoup de méthodes
ne sont pas présentées ici (Variable Neighborhood
search[ Mladenovi\’c and Hansen1997], GRASP [ Feo and Resende1995], Idwalk
[ Neveu et al. 2004]...). Elles donnent pour la plupart des clefs
permettant de sortir des optimums locaux et ont prouvé leur
efficacité sur des problèmes allant de la gestion de ressources
réseaux aux problèmes d’affectation, en passant par la
bioinformatique.
Bien qu’il s’agisse dans la plupart des cas de problèmes à base de
contraintes, une structuration différente du problème est utilisée
par les méthodes incomplètes vis à vis des méthodes complètes.
Dans les premières (incomplètes), l’ensemble des affectations
complètes est considéré tandis que dans l’autre, des affectations
partielles sont construites incrémentalement. Cependant nous
verrons par la suite, au travers d’exemples, qu’une hybridation
peut s’avérer très efficace.
Chapitre 4
Résolution hybride
| L’hybridation de méthodes complètes et incomplètes vise à profiter de leurs atouts respectifs en les fusionnant. La combinaison se fait soit au travers d’une collaboration de ces méthodes, soit par une intégration plus fine. Dans ce chapitre, nous dresserons un panorama des niveaux d’intégration et de collaboration pour des méthodes d’origines et de structures intrinsèquement différentes. |
4.1 Introduction
Comme nous l’avons vu au chapitre 2, les méthodes complètes apportent des garanties en ce qui concerne l’obtention d’une
solution optimale à un problème donné. L’inconvénient est que le temps de calcul augmente de
façon exponentielle avec la taille des instances. Dans ce
contexte, la garantie de l’optimalité est alors concédée vis-à-vis
du temps de calcul.
Pour pallier ce sacrifice, une idée largement répandue pour la
conception de solveurs plus efficaces et robustes, consiste à
combiner plusieurs paradigmes de résolution, afin de bénéficier
des atouts respectifs de chacun d’entre eux. ([ Focacci et al. 2002]
dresse un panorama de telles utilisations de recherche locale (LS)
dans la programmation par contrainte (CP)). Nous retrouvons alors
des hybridations dans lesquelles la recherche locale est utilisée
avec des mécanismes complets pour rendre les voisinages étendus
plus intéressants [ Shaw1998]. Une autre méthode phare
s’appuie sur la recherche locale afin de réparer des affectations
partielles et utilise les techniques de filtrage [ Jussien and Lhomme2002].
Les bénéfices des
combinaisons LS+CP sont bien connus, et
[ Prestwich2000, Pesant and Gendreau1996] proposent des
hybridations entre des méthodes de recherche locale et des
techniques de propagation de contraintes.
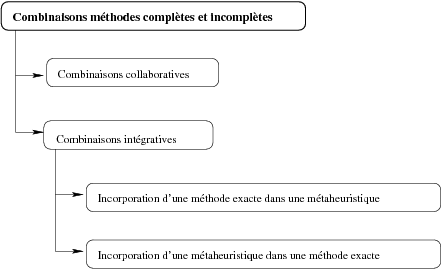
- la collaboration : on combine une méthode exacte et une métaheuristique exécutée en prétraitement et vice-versa. Les méthodes peuvent également fonctionner en parallèle tout en échangeant des informations.
- l’intégration : une LS aide un algorithme complet : à quelques n uds de l’arbre de recherche, construits par l’algorithme de backtracking, la LS est utilisée pour tenter d’atteindre une solution, en partant d’une affectation partielle ou pour améliorer une configuration complète. La LS peut être ainsi considérée comme un mécanisme de réparation supplémentaire. Dans d’autres cas, la LS guide entièrement la recherche : la propagation de contraintes peut être utilisée pour limiter le voisinage ou élaguer des branches de l’espace de recherche. Des techniques complètes sont également utilisées pour explorer le voisinage de la configuration actuelle et choisir la prochaine étape du processus de LS.
4.2 Approches Collaboratives
Dans ce type de combinaison, les algorithmes proposés correspondent à une association de haut niveau entre
métaheuristiques et méthodes complètes, (i.e. aucun algorithme
n’est inclus dans un autre). Ainsi, la combinaison la plus répandue
est l’utilisation en séquence.
La méthode exacte est soit exécutée comme un prétraitement, ou soit
elle utilise la métaheuristique.
Dans [ Applegate et al. 1998] une méthode est proposée pour l’obtention de solutions quasi
optimales du problème du voyageur de commerce. Un ensemble des
solutions est extrait via des exécutions d’une recherche locale
itérative. Les ensembles d’arêtes sont réunis et le problème se
réduit au calcul de l’optimum sur un graphe largement simplifié.
De cette façon, la solution obtenue est habituellement meilleure
que la meilleure des solutions de la recherche locale.
Beaucoup de problèmes d’optimisation possèdent une certaine
structure, c’est-à-dire les configurations de bonnes qualités ont
un grand nombre de caractéristiques communes avec les solutions
optimales. Cette observation peut être exploitée de plusieurs
manières en définissant des sous-problèmes appropriés vis-à-vis du
problème original. Dans la plupart des cas, les sous-problèmes
résultants sont suffisamment petits pour être résolus par une
méthode exacte.
Ce type d’approche se décompose en deux phases. Dans une première,
un algorithme approximatif est utilisé pour collecter des
solutions du problème considéré. Basé sur la composition des
solutions, un sous problème est défini. Il est alors nécessaire
que le sous problème généré contienne si ce n’est toutes, au moins
la plupart des variables de décisions importantes , et
qu’il se résolve facilement.
Les grandes lignes pour cette méthode sont présentées par 4.1.
[!hbt]
#1Exploiter la structure par collecte d’informations
Parfois, une version relaxée du problème original est résolue de façon optimale et les solutions obtenues sont réparées pour constituer les points de départ d’une métaheuristique. La relaxation en programmation linéaire (PL) est souvent utilisée dans ce but. Par exemple, [ Feltl and Raidl2004] résolvent le problème d’affectation généralisé, avec un algorithme génétique hybride : la relaxation PL du problème est traitée par CPLEX et ses solutions fournissent une population d’individus qui seront, si besoin est, soumis à des opérateurs de réparation pour constituer la population initiale. Une autre approche de type séquentiel est celle d’un B&B couplé à un AG décrit dans [ Nagar et al. 1995] où les solutions du problème d’ordonnancement flow-shop (ou atelier en ligne) avec deux machines sont représentées en tant que permutation des tâches. Avant l’application de l’AG, un B&B est utilisé jusqu’à une certaine profondeur k et les bornes calculées sont enregistrées à chaque n ud de l’arbre B&B. Pendant l’exécution de l’algorithme génétique, les solutions partielles jusqu’à une certaine position k, sont mises en correspondance sur leur n ud associé de l’arbre. Si les bornes indiquent qu’aucun chemin qui suit le n ud, ne mène à une solution, la configuration subit alors une mutation.
4.3 Approche intégrative
Cette fois, la combinaison est plus fine, dans une approche
intégrative les méthodes sont plus étroitement liées.
4.3.1 La recherche locale au secours de l’algorithme complet
L’efficacité d’une méthode complète réside aussi bien dans le choix de la variable à instancier et de la valeur de cette instanciation que dans les outils
dont elle se dote pour établir la consistance.
Métaheuristique pour l’obtention de bornes
Des heuristiques permettent d’établir un ordre sur les variables à instancier afin de réduire l’arbre de recherche et de retarder le backtrack. Elles indiquent l’ordre des valeurs le plus approprié pour trouver une solution plus rapidement ou anticipent le fait que l’affectation partielle courante ne permette pas d’atteindre une solution. Dans le formalisme CSP, avec des contraintes impératives, l’objectif est de trouver une affectation des variables ne violant aucune contrainte. Dans ce contexte, les méthodes incomplètes sont très efficaces, pas trouver une solution directement, ou pour minimiser le nombre de contraintes violées et fournissent alors une borne supérieure suffisamment précise pour un algorithme de type branch and bound. Par exemple, [ Woodruff1999] présente une stratégie de sélection chunking based pour décider des n uds dans l’arbre de B&B où sera appelée la procédure tabou réactive, laquelle pourra trouver une solution. Cette stratégie mesure la distance entre le n ud courant et les n uds déjà explorés par une métaheuristique pour influer sur la sélection. Les expérimentations montrent que l’ajout de métaheuristiques améliore les performances du B&B.Affaiblissement des méthodes complètes
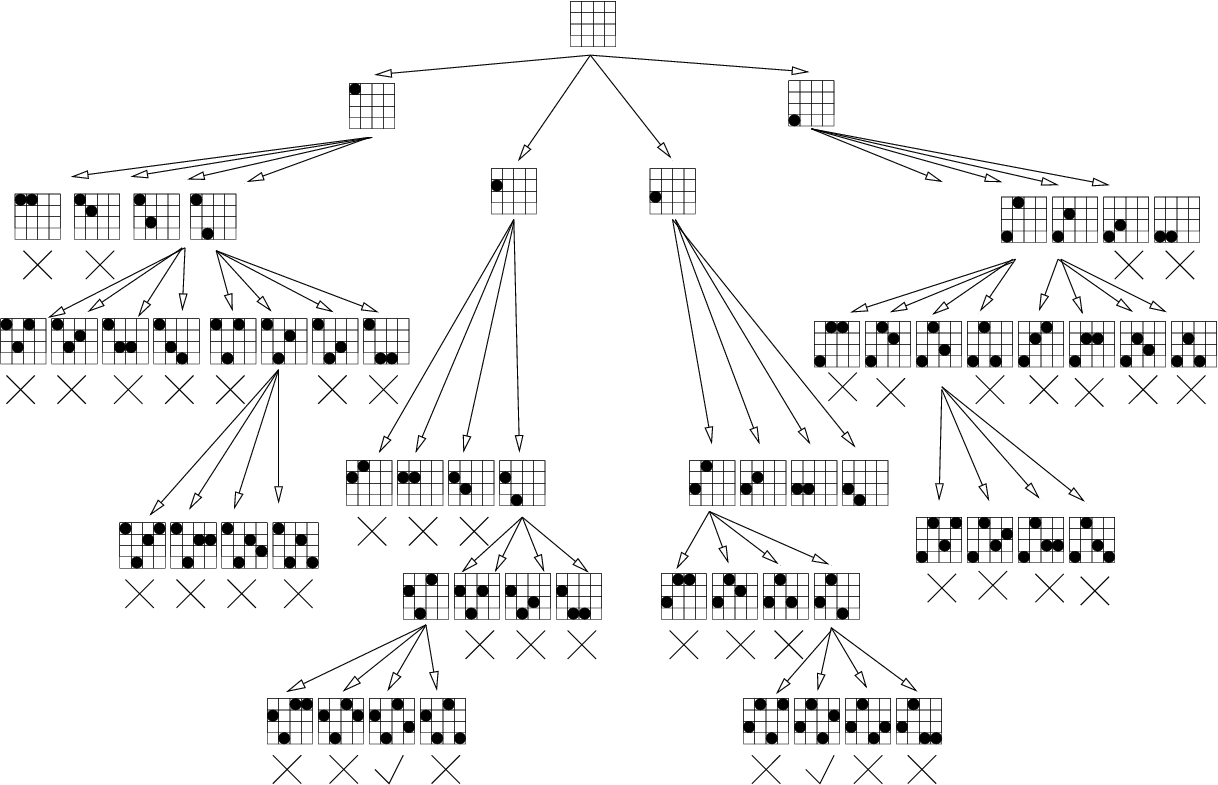
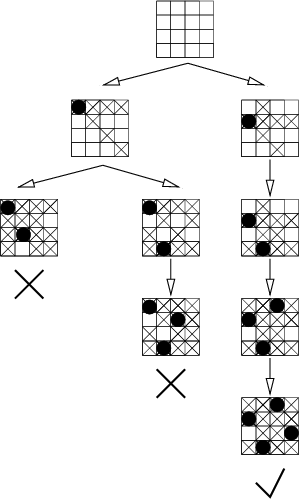
La notion d’affaiblissement intervient dès lors qu’une méthode perd sa complétude. Les raisons, qui contraignent l’exploration à élaguer certaines branches de l’arbre de recherche, peuvent être liées à un temps d’exécution limité ou la décision de concentrer la recherche sur une zone jugée plus intéressante et prometteuse. C’est justement, dans ce type de décision qu’interviennent des heuristiques, et de façon plus globale, les méthodes incomplètes. Certaines méthodes consistent, sur la base d’une heuristique, à supprimer certains n uds. Par exemple, [ Ginsberg and Harvey1990] présente un algorithme appelé iterative broadening. Dans cet algorithme un chemin est initialement proposé par une heuristique. Les domaines des variables sont ainsi réduits à une seule valeur. Puis de manière incrémentale, à chaque fin d’exploration d’un problème simplifié, on réalise une réduction moins forte des valeurs des domaines, en prenant en compte les i premières valeurs des domaines. Limited Discrepancy search (LDS) [ Harvey and Ginsberg1995] est un algorithme de recherche qui limite l’effort de recherche dans des régions de l’arbre jugées plus prometteuses pour trouver une solution.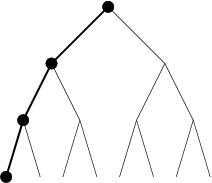 | 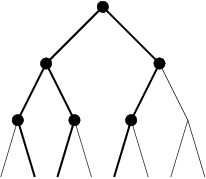 |
| discrepancy 0 | discrepancy 1 |
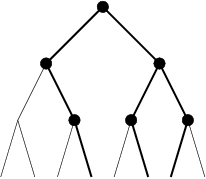 | 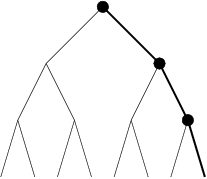 |
| discrepancy 2 | discrepancy 3 |
Le processus de recherche choisit dans un premier temps, les meilleurs n uds en fonction d’heuristiques données à chaque point de décision (ce que l’on nomme la recherche discrepancy 0). Si aucune solution n’a pu être trouvée, avec une discrepancy 0, le processus de recherche permet de sélectionner un autre sous-n ud à chaque point de décision (discrepancy 1). Si une solution ne peut être atteinte, la recherche se fait ensuite par augmentation des n uds visités de façon incrémentale (discrepancy 2, discrepancy 3). La figure 4.2 nous montre les chemins parcourus par une recherche LDS sur un arbre binaire de profondeur 3. Supposons que l’heuristique mise en uvre ordonne les n uds de gauche à droite, avec une (discrepancy 0) la recherche sélectionne le n ud gauche à chaque point de décision. L’ensemble des chemins possibles est alors emprunté à la (discrepancy 3).
4.3.2 Une méthode complète au c ur du voisinage d’une
recherche locale
Nous considérons ici les techniques dans lesquelles des algorithmes
exacts sont incorporés dans des métaheuristiques.
Recherche exacte et voisinage large
Une idée assez répandue consiste à explorer les voisinages, dans une métaheuristique à base de recherche locale, au moyen d’algorithmes exacts. Si le voisinage est choisi de façon appropriée, il peut être de grande taille. Néanmoins, une recherche efficace saura trouver le meilleur voisin. Ces techniques sont connues sous le nom de Very Large-Scale Neighborhood (VLSN) search [ Ahuja et al. 2002]. L’idée centrale, dans ce type d’algorithme combinant recherche locale et méthodes exactes, est de modéliser le problème d’une recherche dans un grand voisinage comme un problème d’optimisation, lequel est résolu par une méthode exacte. La solution obtenue remplace alors la solution courante de la recherche locale. Un algorithme général d’une telle méthode peut se décrire par l’algorithme 4.2 [!hbt] #1Recherche dans un voisinageUne autre possibilité est que seule une partie du voisinage soit examinée à chaque étape de recherche locale. Ce qui se fait classiquement lorsqu’une partie de la solution courante est conservée, définie comme solution partielle, et que les autres variables de décision sont laissées libres. L’algorithme 4.3 présente une vue d’ensemble d’une telle procédure. [!hbt] #1Recherche partielle dans un voisinage
[ Burke et al. 2001] présente une recherche locale avec voisinage variable pour le problème du voyageur de commerce, dans laquelle les auteurs insèrent un algorithme exact dans la partie recherche locale, appelée HyperOpt, dans le but de rechercher de manière exhaustive de larges, mais prometteuses régions de l’espace des solutions. De plus, ils proposent une hybridation HyperOpt et 3-opt permettant de bénéficier des avantages des deux approches, utilisant cette hybridation à l’intérieur d’une recherche à voisinage variable. Ils sont capables alors d’outrepasser les optima locaux et ainsi de créer des parcours de qualité. Dynasearch [ Congram2000] est un autre exemple où des voisinages de grande taille sont explorés. Le voisinage où la recherche est exécutée se compose de toutes les combinaisons possibles, des étapes mutuellement indépendantes, d’une recherche simple . Un mouvement de Dynasearch se compose d’un ensemble de mouvements indépendants exécutés en parallèle par itération de recherche locale. L’indépendance pour Dynasearch signifie que les différents mouvements n’interfèrent pas entre eux ; dans ce cas, la programmation dynamique peut être employée pour trouver la meilleure combinaison de mouvements indépendants. Dynasearch est limité aux problèmes où les étapes de recherche sont indépendantes, et n’a été jusqu’ici uniquement appliqué qu’aux problèmes où les solutions sont représentées par des permutations. [ Puchinger et al. 2004] propose une combinaison AG/B&B pour résoudre le glass cutting problem où l’AG utilise une représentation sous forme de permutation : order-based laquelle est décodée par une heuristique gloutonne. L’algorithme de B&B est appliqué avec une certaine probabilité améliorant la phase de décodage en générant des sous-motifs optimaux. N. Jussien et O. Lhomme [ Jussien and Lhomme2002] proposent un algorithme hybridant recherche locale et méthodes complètes. L’idée centrale de decision repair est basée sur des contraintes d’énumération, une affectation partielle est alors crée par ces contraintes, des contraintes d’énumération sont ensuite ajoutées. La recherche locale se réalise dans ce contexte sur un chemin de décision aidée par des techniques de filtrage. De plus une liste taboue des décisions est maintenue pour mémoriser les échecs rencontrés et guider la recherche.
Recouper les solutions
Les sous-espaces définis par le recoupement d’attributs depuis deux solutions ou plus, peuvent, comme le voisinage d’une seule solution, être aussi explorés par une méthode exacte. Les algorithmes de [ Applegate et al. 1998, Klau et al. 2004] suivent cette idée, mais de manière séquentielle. Dans cette partie, nous nous focalisons sur un recoupement appliqué itérativement au travers d’une métaheuristique. Dans le cadre [ Cotta and Troya2003] pour l’hybridation B&B et des algorithmes évolutionnaires, le B&B est utilisé en tant qu’opérateur d’un algorithme évolutionnaire. Les auteurs rappellent les concepts théoriques et notamment le potentiel dynastique de deux chromosomes x et y, correspondant à l’ensemble des individus porteurs d’information sur x et y. Basée sur ce concept, ils développent l’idée d’une recombinaison dynastique optimale. Le résultat est un opérateur explorant le potentiel des solutions recombinées grâce au B&B, fournissant ainsi les meilleures combinaisons à partir des parents. L’ensemble des expérimentations, comparant différents opérateurs de croisement avec cette méthode hybride, montre l’utilité d’une telle approche. [ Marino et al. 1999] présente une approche où un AG est combiné à une méthode exacte pour le Linear Assignment Problem (LAP) afin de résoudre le problème de coloriage de graphes. L’algorithme LAP est incorporé dans l’opérateur de croisement et génère la permutation de couleurs optimale. Cet algorithme n’est pas plus performant que les autres approches, mais fournit des résultats comparables.Filtrer l’espace de recherche
Si les métaheuristiques utilisent les contraintes pour une fonction d’évaluation, elles peuvent utiliser la formulation de ces contraintes et exploiter le fait qu’elles puissent réduire l’espace de recherche, notamment grâce aux algorithmes établissant la consistance. Dans [ Vasquez and Dupont2002], les contraintes binaires permettent un filtrage par arc consistance réduisant l’espace à explorer pour la méthode Tabou.Utiliser le schéma d’une méthode incomplète pour une méthode complète
H. Deleau propose dans sa thèse [ Deleau2005] un cadre d’hybridation dans lequel la structure des algorithmes génétiques est utilisée pour modéliser un recherche complète. Le principe général des algorithmes génétiques est alors conservé, mais l’originalité vient du fait que cette fois les individus correspondent à des sous-ensembles de l’espace de recherche. Ce cadre unificateur intègre alors des mécanismes de réduction propres aux méthodes complètes sur ces individus pour réduire l’espace de recherche.
4.4 Conclusion
De telles combinaisons ont été aussi étudiées afin d’améliorer
l’efficacité des méthodes évolutionnistes pour des CSP
[ Tam and Stuckey1999, Riff Rojas1996]. Ces algorithmes hybrides sont
appliqués aux divers problèmes de satisfaction de contraintes
(satisfiabilité en logique propositionnelle [ Lardeux et al. 2005],
le problème du voyageur de commerce...).
La principale conclusion que nous pouvons tirer est qu’il existe
beaucoup d’opportunités pour développer de tels algorithmes
hybridant méthodes exactes et techniques de recherche locale. Un
certain nombre d’approches a été présenté, parfois complexes,
pouvant être améliorées et étendues vers des applications
différentes de celles proposées initialement.
Ces techniques partagent néanmoins une philosophie commune sur la combinaison de méthodes
complètes et incomplètes. Une méthode est
désignée comme le processus de recherche principal et une autre
secondaire est utilisée comme heuristique d’amélioration avec une
organisation hiérarchique est presque figée. Pour chaque méthode
de résolution, une structure spécifique est décrite, ce qui limite
les possibilités de se comparer aux autres méthodes.
Il est nécessaire dès lors, d’homogénéiser les définitions et les
concepts mis en jeux pour la combinaison des méthodes complètes et
incomplètes. Pour atteindre cette généralisation, la difficulté
réside dans la recherche d’un cadre général unificateur.
Chapitre 5
Cadre et algorithme
générique pour la propagation
de contrainte
| Krzysztof Apt présente dans [ Apt1997, Apt1999] un cadre théorique pour modéliser les opérations élémentaires effectuées par un solveur complet. Dans ce contexte, la propagation de contrainte et le filtrage correspondent au calcul du point fixe d’un ensemble de fonctions sur un ordre partiel. Ces fonctions, appelées fonctions de réduction, abstraient la notion de contraintes. Dans ce chapitre nous rappellerons le cadre et l’Algorithme Générique qui nous permet d’atteindre ce point fixe. Nous nous placerons dans le contexte des domaines composés pour approcher au mieux le modèle CSP. |
5.1 Introduction
Comme le montrent les chapitres qui précèdent, il existe une
grande variété de méthodes pour résoudre les problèmes de
satisfaction de contraintes. Certaines utilisent la propagation de
contraintes pour réduire les domaines et donc diminuer l’espace de
recherche jusqu’à réduire éventuellement les domaines à de simples
singletons. Dans ce chapitre nous allons présenter un cadre pour
modéliser la propagation de contraintes, ses propriétés, et un
algorithme générique issu de [ Apt2003]. Ce cadre nous sera
très utile par la suite. En effet, il permet d’abstraire le
fonctionnement des algorithmes pour la résolution des CSP. Cette
abstraction consiste en une formulation mathématique des
opérations de résolution et de leurs propriétés.
L’objectif est alors de montrer que la propagation de contraintes
peut être expliquée en terme d’itérations chaotiques menant à un
point fixe d’un ensemble fini de fonctions. Le calcul des limites
d’ensembles de fonctions doit son origine à l’analyse numérique
avec [ Chazan and Miranker1969], et fut adapté pour l’informatique avec
[ Cousot1978, Cousot and Cousot1977]. Quant à l’idée de concevoir
l’utilisation des contraintes en terme de fonctions, elle fut
développée notamment par [ Benhamou1996] avec les fonctions de
narrowing attachées aux contraintes, dans le contexte de
l’arithmétique des intervalles réels. Le modèle des itérations
chaotiques a aussi servi de cadre à [ Fages et al. 1998] pour
des CSP dynamiques, dans les preuves de terminaisons d’exécutions
d’opérateurs.
Dans un premier temps, nous présenterons le contexte, ou plutôt ce
qui servira de support mathématique à la résolution et ses liens
avec le modèle CSP traditionnel. Puis, nous verrons comment un
algorithme générique peut s’écrire dans cette structure. Nous
finirons en présentant les finalités de ce cadre, à savoir des
propriétés de convergence.
5.2 Ordre partiel
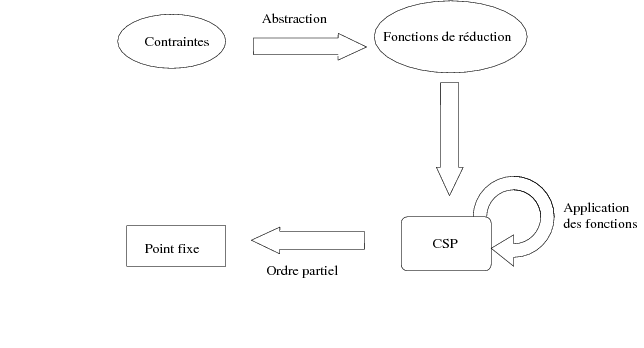
L’objectif du cadre défini par Apt, se servant de la notion d’ordre partiel, est de définir un ensemble de fonctions capables de converger vers un point fixe. En effet, la recherche des solutions, le processus de résolution est englobé dans une structure ordonnée. La figure 5.1 schématise le cadre de résolution, nous y retrouvons les contraintes, celles-ci sont décrites sous forme d’opérateurs de réduction (fonctions de réduction). Les fonctions sont appliquées sur le problème modélisé en CSP et l’application de ces fonctions correspond en réalité à une succession de réductions dans un ordre partiel.
- réflexive si (x,x) ∈ R pour tous x de D,
- irréflexive si (x,x) ∉ R pout tous x de D,
- antisymétrique si quelques soient x,y ∈ D on a (x,y) ∈ R et (y,x) ∈ R alors x=y,
- transitive si pour tous x,y,z ∈ D on (x,y) ∈ R et (y,z) R alors on a aussi (x,z) ∈ R.
5.3 Fonctions et propriétés
L’ordre partiel constitue ici le support de calcul pour les
fonctions que nous utiliserons. Mais pour obtenir un point fixe,
et afin d’établir une certaine cohérence dans les mécanismes en
jeu, des propriétés fondamentales sur ces fonctions sont
nécessaires.
Définition 16
Soit un ordre partiel (D,\sqsubseteq) et une fonction f sur D.
- f est dite inflationnaire si x \sqsubseteq f(x) pour tout x.
- f est dite monotone si x \sqsubseteq y implique que f(x) \sqsubseteq f(y) pour tous x,y.
Soit un ensemble D, un élément d ∈ D et un ensemble de fonctions F = { f1,...,fk} portant sur D.
- une exécution (de fonctions f1,...,fk) correspond à une séquence infinie de nombre de [1..k].
- une exécution i1,i2,... est dite équitable si tout i ∈ [1..k] apparaît une infinité de fois.
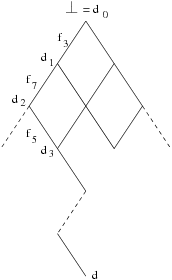
- Une itération de F est définie comme une de valeurs d0,d1,d2...induite par :
d0 = ⊥. avec ij ∈ [1..k].
dj = fij(dj-1). - On a une suite croissante d0 \sqsubseteq d1 \sqsubseteq d2 ... d’éléments de D qui peut se stabiliser en d si pour j ≥ 0 on a di = d pour i ≥ j.
|
- Soit d0, d1,... l’itération en mentionnée. Pour un certain j ≥ 0 on a di = d pour i ≥ j. Considérons un point fixe e des fonctions de F. Nous pouvons prouver que d \sqsubseteq e. La preuve se fait par induction sur i avec di \sqsubseteq e. La proposition est vraie pour i=0 puisque d0 = ⊥. Supposons maintenant que cela est vrai pour i ≥ 0. Nous avons di+1 = fj(di) pour un j ∈ [1..k]. De part la monotonie de la fonction fj et de l’hypothèse d’induction fj(di) \sqsubseteq fj(e), on a di+1 \sqsubseteq e car par définition fj(e) = e.
5.4 Application aux CSP et domaines composés
Nous pouvons à présent nous rapprocher du modèle CSP et de sa
résolution. L’ordre partiel est alors instancié par les domaines
du CSP où les différents CSP obtenus lors de la résolution par
propagation sont des éléments de l’ensemble D. Pour être plus
formel, il nous faut décrire l’ensemble des CSP que l’on peut
obtenir à partir du CSP initial.
Soit un CSP (X, D, C), on appelle
l’ensemble des parties de D, noté P(D),
l’ensemble des sous-ensembles possibles de D. On obtient un
ordre partiel, si nous considérons l’ordre (P(
D), ⊇ ), où ⊇ est la relation d’inclusion
inverse ensembliste.
Un CSP ne se limite pas à un domaine, il nous faut alors
considérer l’ensemble des domaines des variables et donc le
produit cartésien de ces domaines.
Soit le produit cartésien P(D1) ×... ×
P(Dn) dont les éléments sont ordonnés de la façon suivante :
|
- Arc_consistence1 : (Dx,Dy) → (Dx’,Dy) t.q. Dx’ = {a ∈ Dx | ∃b ∈ Dy, a < b}
- Arc_consistence2 : (Dx,Dy) → (Dx,Dy’) t.q. Dy’ = {b ∈ Dy | ∃a ∈ Dx, a < b}
5.5 Algorithme générique itératif
Le calcul du plus petit point fixe commun d’un ensemble de fonctions F est obtenu par l’algorithme suivant : [!hbt] #1GI: Algorithme Générique Itératif
où G est l’ensemble courant des fonctions restant à appliquer (G ⊆ F), d est un ensemble partiellement ordonné et, pour tout G,g,d, l’ensemble des fonctions actualise(G,g,d) de F est tel que :
- A : { f ∈ F - G | f(d) = d ∧f(g(d)) ≠ g(d)} ⊆ actualise(G,g,d).
- B : g(d) = d implique que actualise(G,g,d) = Æ.
- C : g(g(d)) ≠ g(d) implique que g ∈ actualise(G,g,d)
- L’ordre \sqsubseteq est instancié par ⊇ , l’inclusion ensembliste habituelle,
- d : = ⊥ correspond à d : = D1 ×...× Dn, le produit cartésien des domaines des variables du CSP,
- F est un ensemble de fonctions de réduction monotones et croissantes qui abstraient les contraintes pour réduire les domaines des variables.
5.6 Conclusion
Nous avons introduit dans ce chapitre la propagation de contrainte
comme une instance d’un algorithme itératif. D’une part, ceci
simplifie le raisonnement autour de la validité des algorithmes et
clarifie leurs natures. Plus précisément, ce modèle considère un
algorithme générique itératif sur un ordre partiel dont
l’exactitude devient une preuve. Les algorithmes instanciés en
ordre partiel et en fonction de réduction offrent une voie, par
cette généralité, vers une multitude de méthodes de propagation.
D’autre part, ce cadre abstrait nous servira de base pour
l’étendre vers une future hybridation avec des méthodes
incomplètes telle la recherche locale et les algorithmes
génétiques.
Part 2
Cadre théorique uniforme pour la
résolution des CSP
Chapitre 6
Introduction de la recherche
locale
|
6.1 Introduction
Dans le chapitre 5, nous avons présenté un modèle qui
repose sur les itérations chaotiques pour définir un cadre
mathématique d’itération d’un ensemble fini de fonctions sur des
domaines abstraits munis d’un ordre partiel. Ce cadre est
particulièrement adapté à la résolution de CSP par propagation de
contraintes : les domaines sont instanciés par les domaines de
valeurs des variables et les fonctions par des fonctions de
réduction de domaines qui éliminent les valeurs inconsistantes
(relativement aux contraintes) de ces domaines.
Afin d’obtenir un solveur complet (i.e., un solveur capable de
décider un CSP admet ou non des solutions), la propagation de
contraintes est associée à un mécanisme de découpage des domaines
(tel que l’énumération) afin de diviser l’espace de recherche en
zones plus petites au sein desquelles on peut espérer continuer la
propagation. La propagation et la découpe alternent alors jusqu’à
ce qu’une solution soit obtenue.
Dans ce chapitre, nous proposons un modèle étendu pour l’hybridation intégrant le découpage et la
recherche locale par le biais de 3 notions : les échantillons qui
sont des points représentatifs de l’espace de recherche, un
voisinage qui détermine comment se déplacer d’un échantillon vers
un autre et une fonction d’évaluation qui permet d’estimer la
qualité des échantillons. La recherche locale explore alors
l’espace de recherche en se déplaçant d’échantillon en échantillon
afin d’atteindre un optimum. Ces mouvements sont modélisés dans ce
cadre comme des fonctions de réduction.
Nous introduisons dans notre modèle la notion de SCSP, i.e., des
CSP intégrant des échantillons. Nous intégrons également la
découpe comme un ensemble de fonctions de réduction. Ainsi, les
domaines abstraits des itérations chaotiques sont instanciés par
une union (ensemble) de SCSP. Les fonctions de réduction de
domaines habituelles (propagation de contraintes) sont étendues
pour s’intégrer à ce cadre. De nouvelles fonctions (les fonctions
de recherche locale) sont introduites pour se déplacer
d’échantillon en échantillon : ces fonctions ont alors les bonnes
propriétés pour être utilisées dans l’algorithme des itérations
chaotiques.
Dans ce cadre, la propagation de contraintes, les mouvements de
recherche locale et les fonctions de découpe sont considérés au
même niveau et appliqués aux SCSP. Comme l’ordre d’application de
ces fonctions est libre, ce cadre nous permet d’envisager diverses
stratégies de combinaison. De plus, le calcul correspond encore à
l’obtention d’un point fixe.
Afin d’illustrer notre modèle, nous présentons des
expérimentations réalisées avec un solveur hybride permettant
d’évaluer les bénéfices et avantages liés à une résolution mixte.
Les caractéristiques des combinaisons étudiées peuvent alors être
clairement spécifiées dans notre modèle.
6.2 Échantillons et voisinage
Pour unifier les structures de données des différentes méthodes, nous allons définir la notion d’échantillon que manipule la recherche locale ainsi que la notion de voisinage.
6.2.1 Échantillonnage et Notion de solution
La réduction de domaine et le découpage agissent sur les
domaines des variables, tandis que la recherche locale opère sur
une structure différente correspondant en général à un ensemble
particulier de valeurs (points) des domaines. Nous proposons ici
une définition plus générale et abstraite de la recherche locale,
fondée sur la notion d’échantillon.
Définition 19 [Échantillon]
Étant donné un CSP (X,D,C), nous définissons une fonction
d’échantillonnage ε: D → P(D).
Par extension, ε(D) désigne l’ensemble Ud ∈ D ε(d).
Généralement, ε(d) est réduit à d et
ε(D)=D, c’est-à-dire que la recherche locale manipule
directement les affectations, mais cela peut également être un
agrégat de points autour de d, ou une boîte de n-uplets couvrant
d (e.g., pour les domaines continus). De même, aucune condition
n’impose que d ∈ varepsilon(d).
De plus, il apparaît comme essentiel que ε(D)
contienne toutes les solutions. En effet, l’espace de recherche
D est abstrait par ε(D) pour être utilisé par la
recherche locale et doit donc être capable d’en isoler les
solutions.
Dans ce contexte, la recherche locale repose sur une fonction de
voisinage sur ε(D) et sur l’ensemble des échantillons
déjà visités dans un chemin, elle est alors décrite par :
- Une fonction de voisinage sur ε(D), qui calcule l’ensemble des échantillons voisins pour chaque échantillon de ε(D);
- et un ensemble de chemins de recherche locale. Chaque chemin étant composé de la suite des échantillons visités et représente le passage de voisin en voisin.
|
|
|
6.2.2 Ordre sur les échantillons
D’un point de vue pratique, pour la recherche locale, un résultat
est soit un chemin menant à une solution, soit un chemin d’une
taille maximale donnée. Nous définissons alors un ordre, qui par
sa définition, nous permettra une meilleure intégration de la
recherche locale dans le modèle décrit au chapitre 5.1.
L’idée est de formuler l’avancement de la recherche comme une
progression dans une structure ordonnée. Pour ce faire, nous
allons donc concevoir un ordre sur les chemins de recherche
locale, de sorte qu’un chemin sera dit plus grand s’il
correspond à une avancée en terme de recherche. Cela se traduit
comme une amélioration ou un dernier échantillon meilleur d’après
la fonction d’évaluation. De même, étant donné que nous décrivons
l’évolution de la recherche, les plus grands éléments dans cet
ordre sont les chemins menant à une solution ou les chemins de
taille maximale. Pour être en accord avec ces principes, nous
définissons un ordre sur la recherche locale comme suit :
Définition 22 [Relation d’ordre pour la recherche locale]
Considérons une relation \sqsubseteqls sur LSD définie par:
- (s1,..., sn) \sqsubseteqls (s1,..., sn)
- (s’1, ..., s’m) \sqsubseteqls (s1, ..., sn) si n > m et ∀j, 1 ≤ j ≤ m,eval(s’j) ≠ 0 et ∀i, 1 ≤ i ≤ n, eval(si) ≠ 0
- (s’1, ..., s’m) \sqsubseteqls (s1, ..., sn) si eval(sn)=0, ∀i, 1 ≤ i ≤ n-1, eval(si) ≠ 0 et ∀j, 1 ≤ j ≤ m, eval(s’j) ≠ 0
- Pour prouver l’un ordre partiel (LSD, \sqsubseteqls),
nous devons démontrer que :
- la relation est réflexive;
- la relation est transitive;
- la relation est antisymétrique.
Le premier point est obtenu de manière directe depuis la définition de la relation.
Pour le second, étant donnés (r1,..., rm) \sqsubseteqls (s1,..., sn) et (s1,..., sn) \sqsubseteqls (t1,..., tq) montrons que (r1,..., rm) \sqsubseteqls (t1,..., tq). Tout d’abord si (r1,..., rm) = (s1,..., sn) ou si (s1,..., sn) = (t1,..., tq) la preuve est directe. Supposons l’existence de solution parmi les trois chemins, il est clair que ni (r1,..., rm), ni (s1,..., sn) ne peuvent contenir de solution car tous deux admettent un élément qui leur est supérieur. Donc si solution il y a, on a (t1,..., tq) avec eval(tq)=0. Or d’après la définition de l’ordre, l’existence de cette solution suppose que tout autre chemin ne contenant pas de solution lui est inférieur donc (r1,..., rm) \sqsubseteqls (t1,..., tq).
Enfin pour terminer la preuve de la transitivité, nous allons considérer la longueur des chemins. Nous déduisons de la définition de la relation que les chemins de tailles identiques, ne contenant pas de solution, ne sont pas comparables. Or si les chemins sont de longueurs différentes (m > n > q), alors m > q est donc (r1,..., rm) \sqsubseteqls (t1,..., tq).
Il nous faut maintenant prouver l’antisymétrie : si (r1,...,rm) \sqsubseteqls (s1,..., sn) et (s1,..., sn)\sqsubseteqls (r1,..., rm) alors (r1,..., rm) = (s1,..., sn). Nous ne pouvons avoir n ≠ m et de solution dans l’un des deux chemins donc si les chemins sont comparables dans les deux sens c’est qu’ils sont égaux et donc la relation est antisymétrique.
De la réflexivité, la transitivité et l’antisymétrie de la relation, nous en concluons que le couple (LSD,\sqsubseteqls) forme un ordre partiel.
Considérons p1=(a,b), p2=(a,c) et p3=(b) trois éléments de LSD tels que eval(b)=0 (i.e., b est solution). Alors, ces trois chemins correspondent à des résultats possibles d’une recherche locale de taille 2, ils ne sont pas comparables vis-à-vis de la définition 22. Grâce à cet ordre pour la recherche locale, nous allons pouvoir créer notre cadre d’hybridation. En effet, nous allons intégrer cette notion de chemin d’échantillons dans le modèle CSP.
6.3 Modèle de calcul
Nous pouvons dès à présent définir la structure requise pour une
hybridation de la recherche locale et de la propagation de
contraintes. Pour arriver à nos fins, nous allons passer par une
instanciation du cadre abstrait décrit par K. Apt et présenté au
chapitre 5.
Définition 23 [CSP échantillonné]
Un CSP échantillonné (sCSP) est défini par un triplet
(D,C,p), une fonction d’échantillonnage ε, et un
chemin de recherche locale p où
- D = D1×... ×Dn
- ∀c ∈ C, c ⊆ D1 ×... ×Dn
- p ∈ LSD
Étant donné deux sCSP
y = (D,C,p) et y’=(D’,C,p’),
|
|
- Pour prouver l’un ordre partiel, nous devons démontrer que :
- la relation est réflexive;
- la relation est transitive;
- la relation est antisymétrique.
La réflexivité de la relation est directe car elle n’est pas définie comme stricte. La transitivité se déduit aussi de la définition donnée de la relation avec :
et{f1,...,fk} \sqsubseteq {y1,...,yl}
Montrons que{y1,...,yl} \sqsubseteq {p1,...,pm}
D’après la définition on a :{f1,...,fk} \sqsubseteq {p1,...,pm}
où i ∈ [1..k],j ∈ [1..l] et∀fi, (∃yj, fi \sqsubseteq yj et \not ∃yj, yj \sqsubset fi)
où j ∈ [1..l],t ∈ [1..m]∀yj, (∃pt, yj \sqsubseteq pt et \not ∃pt, pt \sqsubset yj)
Nous en déduisons que :
où i ∈ [1..k],t ∈ [1..m]∀fi, (∃pt, fi \sqsubseteq pt et \not ∃pt, pt \sqsubset fi)
La relation est donc bien transitive.
Considérons maintenant l’antisymétrie de la relation :
Hypothèse 1 :
où i ∈ [1..n],j ∈ [1..m].{f1,...,fn} \sqsubseteq {y1,...,ym} ssi ∀fi, (∃yj, fi\sqsubseteq yj et \not ∃yj, yj\sqsubset fi)
Hypothèse 2 :
où i ∈ [1..n],j ∈ [1..l] Si nous réunissons les propriétés qui découlent de la définition nous obtenons ceci :{y1,...,ym} \sqsubseteq {f1,...,fn} ssi ∀yj, (∃fi, yj\sqsubseteq fi et \not ∃fi, fi\sqsubset yi)
et∀fi, (∃yj, fi \sqsubseteq yj et \not ∃yj, yj \sqsubset fi)
Or si nous croisons ces informations, c’est à dire que nous prenons la partie à gauche du et de l’hypothèse 1 avec la partie droite de l’hypothèse 2, nous obtenons que :∀yj, (∃fi, yj \sqsubseteq fi et \not ∃fi, fi \sqsubset yi)
et donc que :∀fi, (∃yj, fi \sqsubseteq yj) et ∀yj (\not ∃fi, fi\sqsubset yi)
si nous faisons de même avec l’autre croisement :∀fi, (∃yj, fi = yj)
donc∀yj, (∃fi, yj \sqsubseteq fi) et ∀fi (\not ∃yj, yj\sqsubset fi)
et∀yj, (∃fi, yj = fi)
Nous pouvons alors en conclure que :∀fi, (∃yj, fi = yj)
et que la relation est antisymétrique, transitive et réflexive.{f1,...,fn} = {y1,...,ym}
6.4 Les solutions
Comme notre cadre est dédié à la résolution de CSP, nous nous
devons de fournir une description précise de la notion de solution
en accord avec la structure mentionnée précédemment. Ces notions
sont clairement définies de part et d’autre pour les méthodes
complètes et incomplètes.
Du point de vue d’une résolution complète, une solution d’un CSP
est un n-uplet de l’espace de recherche satisfaisant toutes les
contraintes. Pour ce qui est de la recherche locale, la notion de
solution est étroitement liée à la fonction eval, qui désigne
comme solution un élément s de ε(D) tel que
eval(s) = 0.
Définition 25 [Solutions]
Étant donné un sCSP y = (D,C,p), l’ensemble des solutions de y est défini par :
- pour les solveurs à base de propagation de contraintes(CP):
SolD(y) = { d ∈ D | ∀c ∈ C, d ∈ c } - pour la recherche locale (LS):
SolLSD(y)={(s1,...,sn) ∈ LSD | eval(sn)=0} - pour un solveur hybride LS/CP :
Sol(y) = {(d,C,p)| d ∈ SolD(y) ou p ∈ SolLSD(y)}
|
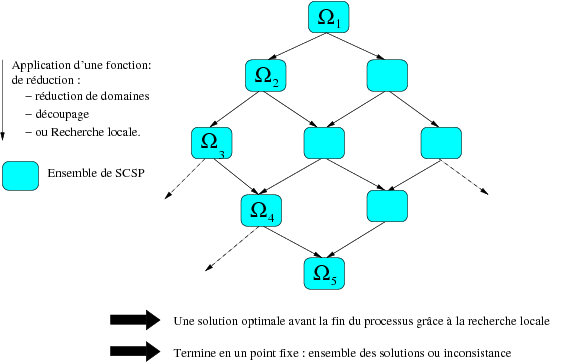
6.5 Fonctions de réduction : définition et propriétés
La structure SCSP a été définie pour une intégration de CP et LS, nous devons dès lors définir nos fonctions hybrides qui seront ensuite utilisées par l’algorithme GI. En effet, que ce soit les déplacements de la recherche locale ou l’utilisation des contraintes pour réduire l’espace de recherche, toutes ces opérations seront assimilées à des fonctions de réduction. Soit un sCSP Y = {y1,...,yn} de SCSP, il nous est nécessaire de définir les fonctions sur Y correspondant à la réduction de domaines, au découpage et à la recherche locale, car chaque catégorie de fonction que nous allons appliquer sur un sCSP a ses propriétés bien distinctes. De plus, les fonctions peuvent s’appliquer sur plusieurs sCSP yi de Y, et pour chaque yi sur ses différents composants. En raison du fait qu’ici nous considérons des CSP avec des domaines finis, notre structure est un ordre partiel fini. Nous allons donc commencer par présenter de quelle manière la réduction de domaine est définie telle des fonctions de réduction puis l’énumération par découpage des domaines et enfin les fonctions correspondant à la recherche locale.
6.5.1 Réduction de domaines
Réduire les domaines signifie retirer des domaines des variables,
des valeurs ne pouvant appartenir à une solution. Cette réduction
de domaine est la conséquence de l’utilisation des contraintes,
dont l’objectif est d’atteindre la propriété de consistance comme
présentée au chapitre 2.3. Les fonctions de
réduction (voir chapitre 5) abstraient donc
l’utilisation des contraintes pour réduire ainsi l’espace de
recherche et sont étendues ici au SCSP.
Définition 26 [Fonction de réduction de domaines]
Une fonction de réduction de domaines red est une fonction :
|
- soit yi = y’i
- ou soit yi = (D,C,p), y’i = (D’,C,p’) et D ⊇ D’ et SolD(yi) = SolD(y’i).
6.5.2 Découpage de domaines
La réduction des domaines à elle seule ne garantit pas l’obtention
d’une solution. En effet le découpage, pouvant aller jusqu’à
l’énumération, est nécessaire pour obtenir une affectation
complète (une seule valeur par domaine) comme nous l’avons vu au
chapitre 2.4. L’idée est donc de diviser
le problème en deux (voire plus) et de résoudre les sous problèmes
indépendamment. Le découpage se fait en général sur une variable
dont on découpe le domaine.
Définition 27 [Découpage de domaines]
Une fonction de découpage de domaines est une fonction sp sur SCSP telle que pour tout Y = {y1,..., yn} ∈ SCSP:
- soit ∃j ∈ [1..m] tel que yi = y’j
- ou soit il existe y’j1, ..., y’jh, j1, ..., jh ∈ [1..m] tels que
SolD(yi) =
∪
k=1..hSolD(y’jk) - soit ∃i ∈ [1..n] tel que yi = y’j
- ou y’j = (D’,C,p’) et il existe yi = (D,C,p), i ∈ [1..n] tels que D É D’.
a. sp(Y)={y’1, ..., y’m} avec n ≤ m,
b. ∀i ∈ [1..n],
c. et, ∀j ∈ [1..m],
6.5.3 Le Recherche locale
Nous pouvons décrire le comportement de la recherche locale par
l’application de fonctions, mais dans ce cas de figure la
recherche ne se fait que sur la partie échantillonnage que nous
avons définie plus tôt.
Définition 28 [La recherche locale]
Une fonction de recherche locale lN est une fonction
|
- N est le nombre maximum de mouvements consécutifs
- ∀i ∈ [1..n]
- soit yi=y’i
- ou yi=(D,C,p) et yi’=(D,C,p’) avec p=(s1,...,sk) et p’=(s1,...,sk,sk+1) tel que sk+1 ∈ N(sk) ∩D et k+1 ≤ N.
- p ∈ SolLSD(y): le dernier échantillon sn du chemin de recherche locale courant ne peut être amélioré par lN,
- la longueur n du chemin de recherche est telle que n=N : le nombre maximum de mouvements autorisé est atteint,
- lN est la fonction identité sur yi, i.e., lN n’essaie plus d’améliorer le chemin de recherche locale du sCSP yi. Ceci se produit si aucun mouvement ne peut s’effectuer (e.g., un algorithme de descente a atteint son minimum local ou tous les voisins sont tabous pour un algorithme de recherche tabou [ Glover and Laguna1997]).
6.6 La résolution d’un sCSP
Pour la résolution complète d’un sCSP {(D1×...×Dn, C,p)} l’algorithme GI doit être instancié de la manière suivante : [!hbt] #1GI: Algorithme Générique Itératif instancié
- L’ordre \sqsubseteq est instancié par l’ordre donné dans la définition 24,
- d : = ⊥ correspond à d : = {(D1×...×Dn, C,p)},
- F est un ensemble de fonctions monotones inflationnaires données, comme définis en section 6.5 : fonction de réduction de domaines (extensions des fonctions de réduction de domaines de CSP habituelles), fonctions de découpage (mécanismes standards de découpage assimilés à des fonctions de réduction), et les fonctions de recherche locale (e.g., fonctions pour la descente, la recherche tabou, etc).
6.6.1 Les fonctions de sélection
Comme le montre la figure 6.2, pour appliquer les
fonctions de réduction, nous devons préalablement choisir : d’une
part sur quel sCSP noté fk de l’ensemble F la
fonction agira, et d’autre part, nous devons sélectionner le
domaine sur lequel cette fonction sera appliquée.
Picture Omitted
Picture Omitted
Définissons ces opérateurs de sélection dans un cadre général. Soit une fonction de sélection :
|
|
|
|
|
|
6.6.2 Réduction de domaine
En se basant sur la notion de fonction de sélection de sCSP,
nous pouvons définir un opérateur de réduction de domaines sur un
sCSP comme :
|
- D = D1×...×Dn, D’ = D’1×...×D’n
et ∀i, 1 ≤ i ≤ n
- Di \not ∈ SelD(y) ⇒ D’i = Di
- Di ∈ SelD(y) ⇒ D’i ⊆ Di
- p’ = p si p ∈ LSD’ sinon p’ correspond à n’importe quel échantillon pris dans ε(D’)
|
Considérons un sCSP P = (D,C,p) avec D=(Dx,Dy), Dx = Dy = [1..10], C = { x < y} et p=(s1) avec s1 = (1,1). L’application d’une fonction de réduction de domaine sur ce sCSP provoque la suppression de la valeur 1 dans Dy. Dans ce cas l’échantillon associé au sCSP n’est plus valide dans le sCSP réduit et donc, par exemple, p’=(s1’) avec s1’ = (1,4) par tirage aléatoire d’une valeur dans Dy. Ainsi par cette sélection double, nous pouvons matérialiser la réduction d’un domaine particulier sur un sCSP particulier. Voyons maintenant comment se définit un opérateur de découpage avec une sélection.
6.6.3 Découpage
Nous commençons par définir l’opérateur de découpage au premier
niveau, sur un simple sCSP de la manière suivante :
y→ Y’
avec y = (D1×...×Dh×... ×Dn,C,p) où {Dh} = SelD(y) et
Y’ = {(D1×...×Dh1×...×Dn,C,p1),...,(D1×...×Dhk×...×Dn,C,pk)} tel que
- Dh = Ui=1k Dhi
- pour tout i ∈ [1..k], pi = p si p ∈ LS(D1×...× Dhi×...×Dn) sinon, pi correspond à n’importe quel échantillon pris dans ε(D1×...×Dhi×...×Dn).
|
6.6.4 La recherche locale
Comme nous l’avons vu, la recherche locale est assimilée à
l’application de fonction sur un ordre partiel \sqsubseteqls;
cet ordre est ensuite utilisé pour la définition de l’ordre
\sqsubseteq de notre structure hybride SCSP. Les
composants restant à définir sont les suivants :
- la stratégie du calcul d’un chemin de recherche locale p’ de longueur n+1 depuis un chemin p de longueur n, et
- le critère d’arrêt qui est communément basé sur un nombre limité de mouvements ainsi que, dans le contexte de la résolution de CSP, sur la notion de solution.
|
- N est le nombre maximum de mouvements autorisé
- y = (C,D,p) et y’=(C,D,p’) avec p=(s1,...,sn)
- p’=p si p ∈ SolLSD
- p’=p si n=N
- p’=(s1,...,sn,sn+1) tel que sn+1 = strat(y) sinon
|
6.6.5 Exemple de mouvement de recherche locale
Pour mettre en uvre ce schéma, nous présentons des exemples
d’heuristiques de mouvement bien connues. Nous avons fait le choix
de modéliser la relance (le restart pour une recherche
locale afin d’effectuer une recherche depuis un nouvel élément
initial) depuis un échantillon choisi aléatoirement après chaque
réduction ou découpage. Considérons un sCSP
y = (D,C,(s1,...,sn)). Chaque fonction consiste à
sélectionner un voisin correct d’un échantillon (i.e., un
échantillon du voisinage qui est aussi dans l’espace réduit D) :
- Random Walk: la fonction stratrw choisit aléatoirement un échantillon du voisinage du courant
stratrw(y) = s t.q. s ∈ D ∩ N(sn) - Descente: la fonction stratd sélectionne un voisin qui améliore l’échantillon courant vis-à-vis de la fonction d’évaluation
stratd(y) = s t.q. s ∈ D ∩N(sn) et s < eval sn - Descente stricte: stratsd est similaire à stratd
mais ne choisit que le meilleur voisin; stratsd(y) = s t.q.
s ∈ D ∩N(sn), s < eval sn, et ∀s’ ∈ D ∩N(sn), s ≤ eval s’ - Tabou de taille l: sélectionne le meilleur voisin non visité durant les l derniers mouvements ;
strattabul(y) = s t.q.
s ∈ ε(D) ∩N(sn) et ∀j ∈ [n-l..n], s ≠ sj et ∀s’ ∈ D ∩N(sn), s ≤ eval s’
6.6.6 Combinaison
La fonction de choix de l’algorithme
GI, gère maintenant complètement la stratégie
d’hybridation/combinaison. En effet, l’ensemble F est instancié
par toutes les fonctions possibles applicables. Nous savons que,
par les propriétés des fonctions (voir chapitre 5),
différents ordonnancements de fonctions aboutissent au même
résultat (en terme de point fixe).
En pratique, nous ne nous intéressons pas nécessairement à l’obtention du point fixe de l’algorithme GI. Nous pouvons en fait vouloir obtenir qu’un sCSP contienne une solution par la recherche locale ou par la propagation de contraintes. Auquel cas, si le but n’est pas l’obtention du point fixe global, différentes exécutions de l’algorithme GI avec différentes stratégies (fonctions de choix) peuvent mener à des solutions différentes (e.g., dans le cas des problèmes à solutions multiples ou de plusieurs optimums locaux).
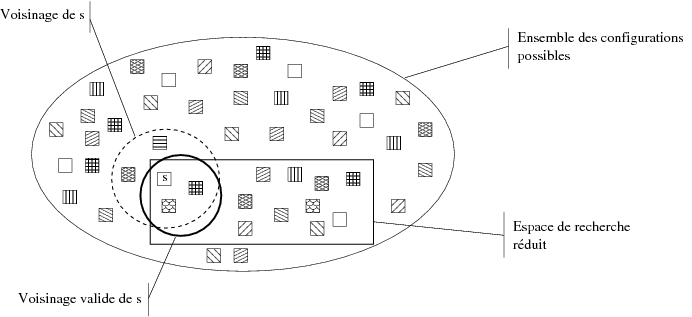
6.6.7 Résultat de l’algorithme GI
Présentons maintenant le résultat de l’algorithme GI pour
les solutions d’un sCSP.
Du fait que nous sommes dans le cadre des itérations chaotiques
(en ce qui concerne les ordre et les fonctions), étant donné un
sCSP Y et un ensemble F de fonctions de réduction
, l’algorithme GI calcule le plus petit point fixe commun
des fonctions de F. Notons que ce résultat est garanti dans la
mesure où nos fonctions LS limitent la taille des chemins et
induisent un ordre partiel fini. Clairement, ce point fixe
glfp(Y) caractérise toutes les solutions de Sol(Y):
- U(d,C,p) ∈ Sol(Y) d ⊇ U(d,C,p) ∈ glfp(Y) d
- pour tout (d,C,p) ∈ Sol(Y) t.q. p=(s1, ..., sn) ∈ SolLSD(Y) il existe un (d,C,p’) ∈ glfp(Y) t.q. sn ∈ ε(d).
En pratique, on peut stopper l’algorithme GI avant l’obtention du point fixe. Par exemple, calculer le point fixe des fonctions de recherche locale ; dans ce cas, l’espace de recherche peut être réduit (et par là, les mouvements possibles) par l’application de certaines fonctions de réduction par propagation. Ceci correspond à la nature hybride de la résolution et aux compromis entre une exploration complète et incomplète de l’espace de recherche. Exemple : Point fixe Dans l’exemple 8 la réduction d’un domaine a provoqué une réinitialisation de l’échantillon s1 = (1,1) or le nouveau s1’ = (1,4) fournit une solution possible au problème avant une réduction des domaines en singletons. La figure 6.3 résume assez bien les interactions entre la réduction de l’espace par la propagation des contraintes et la structure de voisinage de la recherche locale. Dans un premier, nous allons illustrer ce cadre pour le problème du Sudoku en utilisant la Recherche Locale seule.
6.7 Application du modèle de recherche locale pour le Sudoku
Le jeu Sudoku a récemment atteint une popularité internationale,
le succès de ce jeu vient probablement de la simplicité de ses
règles : placer les chiffres de 1 à 9 dans une grille de 9 par 9
de telle sorte que chaque chiffre n’apparaît qu’une seule fois par
ligne, par colonne et par région de 3 par 3(voir figure
6.4). Ce problème peut évidemment être considéré comme un
problème de satisfaction de contraintes et ainsi nous servir de
support pour tester notre modèle avec différentes méthodes de
recherche locale.
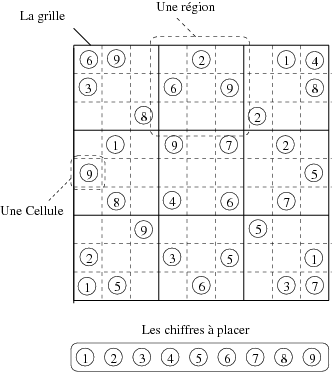
6.7.1 Le modèle CSP
Considérons un problème de taille n2 x n2, une formulation
intuitive considère un ensemble de n4 variables qui
correspondent aux cases à remplir. L’ensemble de contraintes est
alors défini par des contraintes globales de type AllDiff (voir
section 2.4.1, toutes les variables doivent avoir des
valeurs différentes) représentant : chaque nombre apparaît une
seule fois par ligne, une seule fois par colonne et une seule fois
par région. Cette formalisation est telle que une grille de
36×36 équivaut à 1296 variables et 108 contraintes.
Les approches habituelles considèrent des grilles préremplies et
les complètent, ou ont pour but de générer des grilles n’ayant
qu’une seule et unique solution. Notre objectif ici est de générer
des grilles complètes. Même si la programmation par contrainte est
utilisée pour les petits problèmes, ce type d’approches complètes
n’est pas applicable pour des instances plus grandes.
Nous considérons ici uniquement les grilles telles que tous les
nombres apparaissent une seule fois dans chaque région n ×n. Ceci a pour but de mettre en uvre certaines contraintes
directement dans le codage du problème et implique ainsi une
restriction du voisinage à l’ensemble des échanges de cellules
dans une même région. La fonction eval est liée à la notion de
solution et est définie avec pour chaque contrainte AllDiff un
degré de violation (le nombre d’affectation à corriger pour
satisfaire la contrainte). Elle est donc égale à 0 si la
contrainte est satisfaite. L’évaluation eval d’une grille est
alors égale à la somme des degrés de violation de toutes les
contraintes, elle est nulle si la grille satisfait toutes les
contraintes.
6.7.2 Les fonctions
Nous retrouvons les notations précédentes, à savoir : un chemin de
recherche locale p = (s1,s2,..,sn) avec si une
affectation, i.e. une grille remplie entièrement, ainsi que
l’ordre sur ces chemins. Chaque affectation (instanciation de
toutes les cellules de la grille) appartient à l’espace de
recherche S, l’ensemble des grilles possibles. Nous
n’allons pas effectuer ici de réduction de domaines, c’est
pourquoi, pour une étude plus fine, nous détaillerons les aspects
de la recherche. On note V le voisinage du dernier élément de
p tel que V ⊆ N(sn). L’ensemble V représente
un sous ensemble des voisins possibles, car nous verrons par la
suite que le voisinage diffère d’une méthode à une autre. De plus,
nous avons besoin de définir une configuration de LS qui nous sera
utile à la définition des différentes méthodes de recherche
locale. Nous appelons configuration de recherche locale le
couple (p,V) avec p = (s1,s2,..,sn) et V ⊆
N(sn). Ce couple ne change en rien l’ordre qui sera défini
uniquement sur p comme précédemment. Ainsi, les fonctions de
voisinage que nous allons décrire correspondent à des fonctions
d’une configuration à une autre (p,V) → (p,V UV’), le
voisinage sera différent selon la méthode utilisée.
En ce qui concerne les méthodes, la recherche tabou (TS)
[ Glover and Laguna1997] a été appliquée avec succès pour la résolution de
CSP. Cet algorithme interdit les mouvements vers des affectations
déjà visitées lors des l derniers pas de recherche. Nous
considérons de même la descente avec marche aléatoire (RW) où les
mouvements s’effectuent avec une certaine probabilité (notée
\mathfrakpb).
Selon notre modèle, nous devons uniquement décrire les fonctions
qui seront utilisées dans l’algorithme générique pour modéliser
les différentes stratégies. Les fonctions de voisinage sont des
fonctions de (p,V) → (p,V UV’) répondant aux
conditions suivantes :
|
| MouvementMeilleur : | sn+1 = s’ t.q. eval(s’) = mins" ∈ V eval(s") |
| MouvementAméliore : | sn+1 = s’ t.q. eval(s’) < eval(sn) et s’ ∈ V |
| MouvementAléatoire : | sn+1 = s’ t.q. s’ ∈ V |
| Recherche Tabou : | { VoisinageTabou ; MouvementMeilleur } |
| Marche Aléatoire : | {VoisinageComplet ; MouvementMeilleur |
| ;MouvementAléatoire } | |
| Recherche Tabou + Descente : | { VoisinageTabou ; VoisinageDescente |
| ; MouvementAméliore ; MouvementMeilleur } | |
| Marche Aléatoire + Descente : | { VoisinageComplet ; MouvementMeilleur |
| ; MouvementAléatoire ; VoisinageDescente | |
| ; MouvementAméliore } |
6.7.3 Résultats expérimentaux
Dans le tableau 6.1, nous comparons les résultats
obtenus avec la recherche tabou et la marche aléatoire associées à
la descente sur différentes instances (tailles) du Sudoku. Nous
avons préalablement mesuré la difficulté du problème par une
méthode complète classique avec propagation et découpage. Nous
avons alors obtenu un temps de calcul supérieur à un jour pour une
grille 36×36.
Á l’opposé, par une simple formulation du problème et grâce au
modèle d’application des fonctions, nous sommes capables
d’atteindre une solution avec une recherche locale classique, et
ce depuis une grille vide. Pour chaque méthode et chaque instance,
nous avons effectué 2000 exécutions, excepté pour le problème 36×36, 500 exécutions.
Les résultats obtenus par ajout de la descente dans la recherche
tabou ou la marche aléatoire, montrent une réduction du temps de
calcul pour atteindre une solution. Nous remarquons alors, qu’une
stratégie hybride combinant plusieurs fonctions de mouvement et de
voisinage fournit de meilleurs résultats. Notre cadre nous permet
d’accorder au mieux un équilibre entre différentes fonctions de
bases qui caractérisent des stratégies de résolution basiques.
Ainsi, nous pouvons élaborer une grande variété d’algorithmes dans
un simple algorithme générique.
| Recherche Tabou | Marche Aléatoire | |||||
| n2 x n2 | 16x16 | 25x25 | 36x36 | 16x16 | 25x25 | 36x36 |
| temps cpu moy. | 3,14 | 115,08 | 3289,8 | 3,92 | 105,22 | 2495 |
| écart type | 1,28 | 52,3 | 1347,4 | 1,47 | 49,3 | 1099 |
| Nbr de mvts | 405 | 3240 | 22333 | 443 | 2318 | 13975 |
| Descente + Recherche Tabou | Descente + Marche Aléatoire | |||||
| n2 x n2 | 16x16 | 25x25 | 36x36 | 16x16 | 25x25 | 36x36 |
| temps cpu moy. | 2,34 | 111,81 | 2948 | 2,41 | 82,94 | 2455 |
| écart type | 1,42 | 55,04 | 1476 | 1,11 | 36,99 | 1092 |
| Nbr de mvts | 534 | 3666 | 20878 | 544 | 2581 | 14908 |
6.8 Application du modèle pour une hybridation CP+LS
Pour tester notre modèle d’hybridation nous avons sélectionné des
problèmes classiques différents : S+M=M (Send + More =
Money), leCarré magique, Langford numbers, le
problème du Zèbre, la règle de Golomb, et l’Uzbekian
problem, issus de la CSPlib [ Gent et al. ].
6.8.1 Fonctions et stratégies
Nos fonctions de bases sont réparties en trois ensembles : un
ensemble des fonctions de réduction dr, un ensemble des
fonctions de découpage sp, et un ensemble pour les fonctions de
recherche locale ls.
La fonction de choix dans l’algorithme GI est définie ainsi
: soit un tuple (a, β, g) tel que a,
b, et g représentent respectivement le pourcentage de
fonctions de réduction, de fonctions de découpage, et de fonctions
de recherche locale, qui est appliqué ; les fonctions sont
sélectionnées équitablement avec ces ratios.
Les fonctions de réduction sont définies de la façon suivante :
- une fonction de réduction de domaine correspond soit à une réduction à une consistance de bornes ou soit à un opérateur de filtrage pour une contrainte globale ( (e.g., AllDiff),
- une fonction de découpage coupe un domaine sélectionné en deux sous-domaines.
- une fonction de recherche locale est un mouvement de base : les fonctions LS sont ensuite instanciées pour une stratégie de recherche tabou, laquelle sélectionne le meilleur voisin qui n’est pas dans la liste de taille 10.
- random: Sely choisir aléatoirement un sCSP, et SelD choisir n’importe quel domaine du sCSP sélectionné.
- depth-first: Sely choisir le sCSP qui contient le plus petit domaine, et SelD choisit le plus petit domaine du sCSP.
- LS-forward checking: le forward checking consiste à instancier les variables dans un ordre donné et d’anticiper sur les conflits futurs en réduisant les variables liées directement à celle venant d’être énumérée. Notre stratégie LS-forward checking est similaire; les fonctions ls seront appliquées sur le sCSP qui vient d’être découpé.
- width-first: Sely choisir le sCSP qui contient le plus grand domaine, et SelD choisit le plus grand domaine du sCSP sélectionné.
6.8.2 Résultats expérimentaux
L’évaluation et les critères de comparaison correspondent au
nombre de fonctions de bases appliquées pour atteindre une
première solution. Une telle application de fonction est soit : un
pas de recherche locale, soit un découpage, ou soit une réduction
de domaine (réduction d’un domaine en utilisant une contrainte).
Nous étudierons des petits problèmes (voir les définitions des
problèmes au chapitre 1.4), pour lesquels le temps de
calcul ne dépasse pas une minute (e.g., une solution pour le
nombre de Langford est trouvée en une seconde).
Interactions entre CP et LS
Nous utilisons différentes stratégies afin d’étudier les bénéfices de l’hybridation CP+LS, les effets des différentes coopérations sur l’efficacité de la résolution. Commençons par les problèmes du nombre de Langford et S+M=M; les tests sont réalisés en augmentant le pourcentage a de propagation de 0 à 100%. Pour garantir l’obtention de solution, nous imposons un ratio de découpage β = a* 0.1. Par exemple, si a = 40%, nous avons alors β = 4% de découpage , et ainsi 56% de LS. Ces tests utilisent la stratégie en profondeur d’abord (depth-first).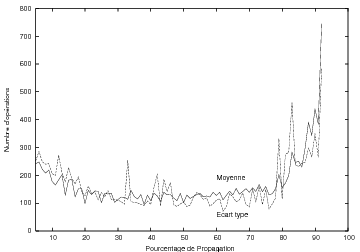
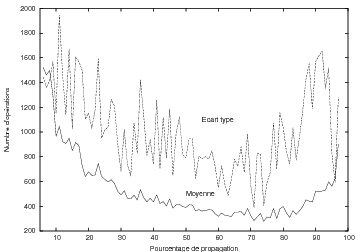
| S+M=M | LN42 | Zèbre | Carré Magique | Golomb | |
| 70-80 | 15 - 25 | 60-70 | 30-45 | 30 - 40 |
Ainsi, choisir les meilleurs ratios pour une hybridation, dépend du problème et de la stratégie appliquée. Le tableau 6.2 présente les meilleures gammes avec la stratégie LS-Forward-checking sur les différents problèmes. Les résultats illustrent le fait que l’introduction progressive de CP dans LS (idem pour LS dans CP) mène à une résolution plus efficace. Les ratios de l’hybridation peuvent ainsi être définis pour optimiser les performances.
Bénéfice de l’hybridation par rapport à LS seule et CP seule
Le tableau 6.3 présente une étude comparative entre l’hybridation CP+LS, CP seule, et LS seule :- les trois stratégies mentionnées précédemment (random, depth-first, LS forward checking)
- CP+LS: les ratios (a,b,g) sont les meilleurs ratios sélectionnés dans le tableau 6.2,
- CP (seule): les rations sont (90%,10%,0),
- LS (seule): les ratios sont (0,0,100%).
| Stratégie | Méthode | S+M=M | LN42 | Carré magique | Golomb |
| Random | LS | 1638 | 383 | 3328 | 3442 |
| CP+LS | 1408 | 113 | 892 | 909 | |
| CP | 3006 | 1680 | 1031 | 2170 | |
| D-First | LS | 1535 | 401 | 3145 | 3265 |
| CP+LS | 396 | 95 | 814 | 815 | |
| CP | 1515 | 746 | 936 | 1920 | |
| FC | LS | 1635 | 393 | 3240 | 3585 |
| CP+LS | 22 | 192 | 570 | 622 | |
| CP | 530 | 425 | 736 | 1126 |
6.9 Conclusion
Les résultats montrent les bénéfices de l’hybridation grâce aux
interactions entre les méthodes de résolution. Les améliorations
apparaissent sur des problèmes pour lesquels LS est meilleure que
CP, mais aussi pour des problèmes où CP est meilleure que LS. De
plus, l’efficacité est étroitement liée à la structure du problème
(telle que la densité de solutions) et à la stratégie choisie. Les
expérimentations avec la stratégie en largeur d’abord (Width-First
strategy) mentionnée plus tôt ne sont pas présentées ici, mais
fournissent des résultats similaires.
Dans ce chapitre, nous avons présenté un modèle pour intégrer
différentes stratégies de combinaison et en prouver quelques
propriétés. Nous avons montré que notre travail peut servir de
base à l’intégration de méthodes LS et CP afin de mettre en valeur
les connexions entre techniques complètes et incomplètes.
Dans ce contexte, les propriétés liées aux solveurs (telles que par exemple la terminaison, les
solutions) peuvent facilement être exprimées et établies. Ce cadre
de travail permet en outre d’envisager de nouvelles stratégies de
combinaison et d’étudier les combinaisons d’algorithmes de
recherches locale entre eux.
Chapitre 7
Modèle hybride pour
les algorithmes génétiques
| Dans ce chapitre, nous présentons une hybridation de méthodes complètes, mais cette fois avec les algorithmes génétiques. La démarche proposée au chapitre 6 est alors appliquée à cette classe des métaheuristiques pour être utilisée dans un contexte d’optimisation sous contraintes. |
7.1 Introduction
Nous voulons utiliser un cadre uniforme nous permettant de
combiner des techniques de propagation de contraintes et les
algorithmes génétiques. Basés sur le principe de la sélection
naturelle, les algorithmes génétiques ont été appliqués
avec succès aux problèmes combinatoires tels que les problèmes
d’ordonnancements ou de transports. L’application d’un algorithme
génétique consiste en la génération successive de meilleurs
individus en fonction du problème choisi. Nous devons définir les
composants suivants (voir chapitre 3) :
- une représentation des solutions potentielles (les individus),
- une manière de créer une première population,
- une fonction d’évaluation eval.
- les opérateurs génétiques qui définissent la composition des enfants: deux opérateurs différents seront ici considérés: le croisement et la mutation.
- un ordre sur les populations pour une intégration dans le cadre.
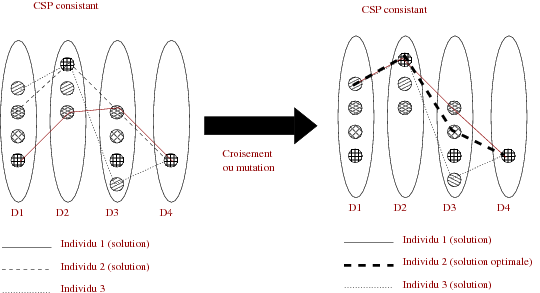
7.2 Algorithme génétique et population
7.2.1 Populations
Les algorithmes génétiques ont pour but de générer de nouvelles
populations via des opérateurs génétiques, sélection [ Bäck et al. 2001],
(e.g. sélection proportionnelle [ Holland1975a], sélection avec
roulette [ Goldberg1989a], sélection par tournois, linear
ranking [ Baker1985], ...), recombinaison (e.g., recombinaison
élitiste [ Thierens and Goldberg1994], recombinaison multiparents [ Eiben et al. 1994]),
et mutation.
Une nouvelle population sera appelée une descendance et peut être
vue comme une application :
|
|
7.2.2 Ordre sur les individus, ordre sur les populations
En pratique, comme pour la recherche locale, les algorithmes
génétiques sont limités par un critère d’arrêt, lequel correspond
pour une majorité des cas, à un nombre maximum d’itérations, i.e.,
un nombre maximum de générations. Donc, en ce qui concerne les AG,
un résultat est soit une population g contenant des solutions ou
soit le processus de recherche a atteint le nombre maximum
d’itération. Concernant l’évaluation des solutions potentielles,
la fonction eval sera utilisée sur les échantillons pour mesurer
la qualité des affectations (nombre de contraintes violées). Mais
aussi, puisque nous sommes dans le contexte de l’optimisation sous
contraintes, cette fonction prend également en compte l’évaluation
par la fonction objectif.
La fonction eval peut être définie de la manière suivante :
|
|
Considérons une fonction d’évaluation eval. La relation d’ordre \sqsubseteqga sur GA est défini de la façon suivante :
|
7.2.3 Structure de calculs
Afin de rendre compte des différentes structures de données
associées à chaque technique de la résolution hybride, nous
complétons le modèle CSP en lui ajoutant un facteur
génétique. Ce facteur correspond au processus génétique et c’est
par lui que se fera l’optimisation.
Commençons par définir la structure de calcul vouée à
l’hybridation CP+AG.
Définition 30 [CSP avec facteur génétique]
Un CSP avec un facteur génétique pour l’optimisation (gCSP) est
défini par une séquence (D,C,p,f) où :
- D = D1×...×Dn
- ∀c ∈ C, c ⊆ D1 ×... ×Dn
- p ∈ GA
- f: fonction objectif.
Étant donnés deux gcsp y = (D,C,p,f) et y’=(D’,C,p’,f), y\sqsubseteq y’ ssi
- D’ ⊆ D
- ou (D’ = D et p \sqsubseteqga p’).
|
7.2.4 Les solutions
En ce qui concerne la programmation par contrainte, une solution
d’un gcsp y = (D,C,p,f) est un tuple qui satisfait toutes les
contraintes. Mais pour les algorithmes génétiques, la notion de
solution est liée à la fonction d’évaluation : une solution est
décrite comme un élément s d’une population g de la séquence
p de sorte qu’à s est assignée la plus petite valeur (ou la
plus grande) de la fonction objectif par rapport à tous les autres
s’ contenus dans p.
Étant donné un gcsp y = (D,C,p,f), ces deux points de vue
induisent deux ensembles de solutions :
- Solutions réalisables : SolCP(y) = { d ∈ D | ∀c ∈ C, d ∈ c }
- Solutions optimales : SolGA(y) = {s | p = (g1,...,gm) et ∀i ∈ [1..m], ∀s’ ∈ gi, s ≤ eval s’ pour une minimisation (resp. s’ ≤ eval s pour une maximisation )}
|
Définition 32 Soit un sCSP Y = {y1,...,yk} pour
- un problème de minimisation : Sol(Y) = Min({si} | si ∈ sol(yi) }
- un problème de maximisation : Sol(Y) = Max({si} | si ∈ sol(yi) }
|
|
7.2.5 Un système à base de fonctions
Á ce stade, nous devons définir les fonctions de réduction sur
SGCSP. Elles décrivent les différents composants du
processus de résolution : la propagation de contraintes par
réduction des domaines et le découpage, combiné aux algorithmes
génétiques.
Soit un élément Y = {y1,...,yn} de SGCSP, nous appliquons des fonctions sur Y correspondant à la
réduction de domaines, au découpage des domaines, et aux
algorithmes génétiques. Ces fonctions sont susceptibles de
s’appliquer sur différents éléments yi de Y, ainsi que
pour chaque yi sur certain de ses composants. Notons que
dans la mesure où nous considérons des ensembles finis pour le
gcsp initial, la structure forme un ordre partiel fini.
Les définitions qui vont suivre introduisent les propriétés
fondamentales des différents opérateurs ainsi que leurs objectifs.
Les définitions de réduction de domaines et de découpage pour une
hybridation CP+AG sont similaires de celles pour CP+LS
(Definitions 26 et 27).
Cependant, cette fois elles s’appliquent sur SGCSP. La
remarque est identique concernant les définitions
36 et 28.
Définition 34 [Fonction de réduction de domaines]
Une fonction de réduction de domaines red est une fonction
:
|
- soit yi = y’i,
- ou soit yi = (D,C,p,f), y’i = (D’,C,p’,f) et D ⊇ D’ et Sol(yi) = Sol(y’i).
- soit ∃j ∈ [1..m] tel que yi = y’j
- ou soit il existe y’j1, ..., y’jh, j1, ..., jh ∈ [1..m] tels que
SolD(yi) =
∪
k=1..hSolD(y’jk) - soit ∃i ∈ [1..n] tel que yi = y’j
- ou y’j = (D’,C,p’,f) et il existe yi = (D,C,p,f), i ∈ [1..n] tel que D ⊇ D’.
a. sp(Y)={y’1, ..., y’m} avec n ≤ m,
b. ∀i ∈ [1..n],
c. et, ∀j ∈ [1..m],
Une fonction algorithme génétique GN est une fonction :
{y1, ..., yn} → {y’1,..., y’n}
- soit yi=y’i
- ou soit yi=(D,C,p,f) et yi’=(D,C,p’,f) avec p=(g1,...,gk)
et p’=(g1,...,gk,gk+1) tel que gk+1 ∈ O(gk) ∩Dm et k+1 ≤ N, où m est la taille de la population.
- n=N: le nombre maximum d’opérations est atteint,
- GN est la fonction identité sur yi, i.e., GN n’essaye plus d’améliorer la génération du GCSP yi. Ceci peut apparaître lorsque plus aucun mouvement ne peut être effectué (e.g., tous les individus sont égaux et la mutation n’est pas permise).
7.2.6 La résolution sGCSP
L’ordre sur SGCSP est fourni à l’algorithme GI,
le plus petit élément ⊥ correspond à {(D,C,p,f)}, i.e.,
le sGCSP initial à résoudre, sont fournies aussi les
fonctions monotones et inflationnaires : réduction de domaines,
découpage et algorithmes génétiques.
Les fonctions de réduction sont dans un premier temps construites
sur GCSP avant d’être étendues sur SGCSP. Dans ce cas, un
processus de sélection est nécessaire pour prendre en compte
chaque sGCSP pouvant être généré pendant la résolution.
Nous n’allons pas détailler ici ce processus du fait qu’il s’agit
du même que celui de l’hybridation avec la recherche locale.
Résultat de l’algorithme générique itératif
Le résultat de l’algorithme GI peut être décrit de manière analogue à celle fournie précédemment. Étant donnés un sGCSP Y et un ensemble F de fonctions de réduction, l’algorithme GI calcule le plus petit point fixe commun des fonctions de F. La figure 7.2 nous montre comment, à partir des contraintes, des opérateurs sous la forme de fonctions de réduction sont appliqués. Nous remarquons que dans cette représentation, la solution optimale peut éventuellement être obtenue par AG avant l’obtention du point fixe global des fonctions de F (qui en fournira alors la preuve), cependant ce point fixe, noté glfp(Y), procure toutes les solutions de Sol(Y) définies par :- U(d,C,p) ∈ Sol(Y) d ⊇ U(d,C,p) ∈ glfp(Y) d
- pour tout (D,C,p,f) ∈ Sol(Y) t.q. p=(g1, ..., gn) ∈ SolGAD(Y) il existe un (d,C,p’,f) ∈ glfp(Y) t.q. ∃i ∈ [1..n], d ∈ gi.
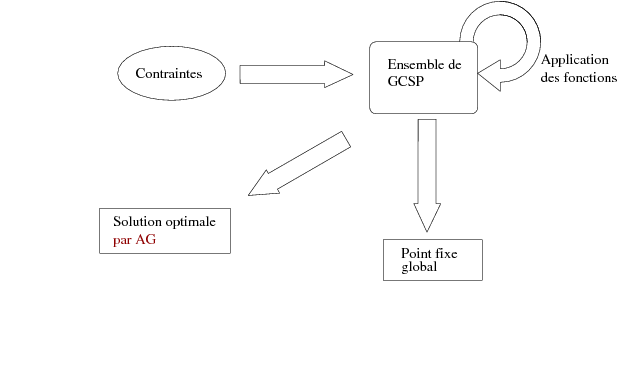
Le premier item consolide le fait que les fonctions de réduction et de découpage utilisées, protègent les solutions. Le second garantit que dans toutes les séquences de populations, qui sont solutions de l’algorithme génétique, il y a une population contenant un tuple qui est dans le point fixe de l’algorithme GI.
7.3 CP+AG pour les problèmes d’optimisation
7.3.1 Instances du problème
Le problème d’équilibrage des diplômes (BACP : Balanced Academic
Curriculum Problem) est une classe de problèmes issue de la
CSPlib [ Gent et al. ]. Il consiste à planifier les cours composant
un diplôme afin d’équilibrer la charge des étudiants pour chaque
période scolaire. Chaque cours est doté d’un certain nombre de
crédits représentant la quantité de travail nécessaire pour le
suivre avec succès. La charge d’une période est la somme des
crédits de chaque cours de la période. D’autres contraintes sont
ajoutées : une charge maximale et minimale par période, et des
rapports de précédence sont établis entre certains cours (figure
7.3).
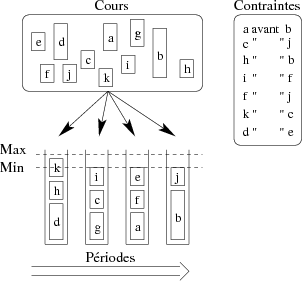
- Un nombre de cours m, un nombre de périodes n : chacun des m cours doit être affecté à une des n périodes,
- une charge académique ci : pour chaque cours i, un nombre de crédits (coût),
- des prérequis (contraintes de précédence) : certain cours peuvent nécessiter d’autre cours en prérequis (e.g. le cours b a le cours a comme prérequis : xa < xb),
- β charge académique minimum : un nombre minimum de crédits par période est nécessaire,
- g charge académique maximum : un nombre maximum de crédits par période est autorisé pour éviter la surcharge horaire,
- δ nombre minimum de cours : un nombre minimum de cours par période est nécessaire,
- ε nombre maximum de cours : un nombre maximum de crédits par période est autorisé pour éviter la surcharge de travail.
7.3.2 Processus expérimental
Comme pour CP+LS, nos fonctions de bases sont organisées en trois
ensembles : l’ensemble des fonctions de réduction dr, l’ensemble
des fonctions de découpage sp, et l’ensemble des fonctions
d’algorithmes génétiques ga. Dans ce qui suit, la stratégie de
profondeur d’abord est utilisée.
Les fonctions de réduction correspondent à des opérateurs d’arc consistance pour les contraintes binaires de précédence entre les cours et de réduction de contraintes globales (e.g., period,load) sont utilisées pour modéliser les problèmes et élaguer l’arbre de recherche en détectant les inconsistances. Les contraintes globales period(i,δ,ε) calculent le nombre de domaines avec la valeur i. Si moins de j occurrences de i sont présentes dans les m domaines alors le CSP courant est localement inconsistant :
|
|

- la population k+1 a moins de 100 individus: un individu est sélectionné aléatoirement, puis est soit couplé avec un autre parent pour créer deux enfants dans k+1, soit est victime d’une mutation ou demeure inchangé.
- la population k+1 a 100 individus: les 60 meilleurs sont sélectionnés selon la fonction d’évaluation qui prend en compte la fonction objectif.
7.3.3 Résultats expérimentaux
Pour les expérimentations, nous avons intégré le module AG (i.e.,
ga fonctions) dans notre système à base de contraintes pour
l’hybridation. De même, nous avons ajouté la notion d’optimisation
à la simple notion de solution.
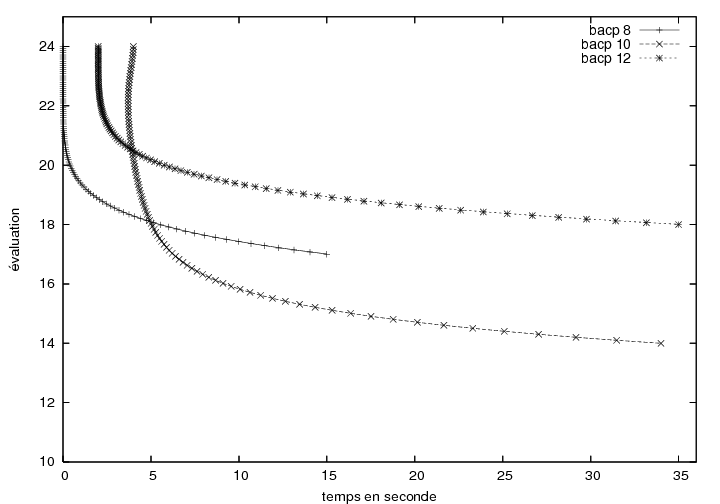
| Qualité sol. | bacp 8 | Qualité sol. | bacp 10 |
| 24 | 137.08 | 33 | 9.11 |
| 23 | 218.23 | 32 | 25.38 |
| 21 | 218.43 | 30 | 25.65 |
| 20 | 712.84 | 29 | 1433.18 |
| 19 | 1441.98 | 27 | 1433.48 |
| 18 | 1453.73 | 26 | 1626.49 |
| 17 (optimum) | 1459.73 | 24 | 1626.84 |
| Qualité sol. | bacp 8 | bacp 10 | bacp 12 |
| 24 | 0.47 | 4.71 | 2.34 |
| 23 | 0.54 | 4.67 | 2.40 |
| 22 | 0.61 | 3.68 | 2.48 |
| 21 | 0.61 | 4.36 | 2.76 |
| 20 | 0.69 | 4.63 | 3.20 |
| 19 | 0.83 | 4.95 | 4.25 |
| 18 | 1.20 | 5.13 | 35.20 |
| 17 | 15.05 (optimum) | 5.60 | |
| 16 | 6.39 | ||
| 15 | 8.53 | ||
| 14 | 34.84 (optimum) |
La figure 7.5 nous montre l’évolution des différentes fonctions d’évaluation selon les problèmes, nous observons pour chacune d’elles une convergence plus moins rapide vers son optimum global. Comme mentionné plus tôt, nous contrôlons les taux pour chaque famille de fonctions dr, sp et ga pour définir la stratégie , par un tuple (%dr,%sp,%ga) de ratio d’applications. Ainsi, ces valeurs correspondent aux probabilités d’application d’une fonction pour chaque famille. En pratique, nous mesurons en figures 7.6 le taux d’applications efficaces, i.e., nous comptabilisons les fonctions choisies par la stratégie et ayant un réel impact sur la résolution. Pour évaluer le bénéfice de chaque méthode nous avons mesuré :
- pour CP: le nombre de réductions efficaces effectuées et le nombre de découpages,
- et pour AG : le fait que la génération suivante est globalement meilleure que la précédente.
|
||||
|
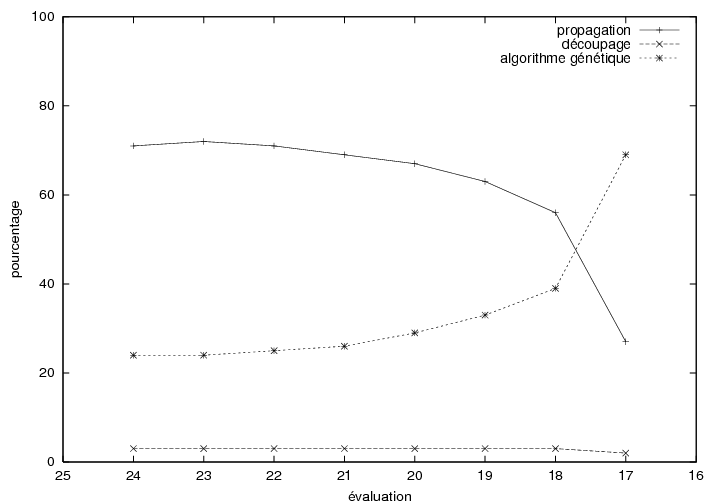
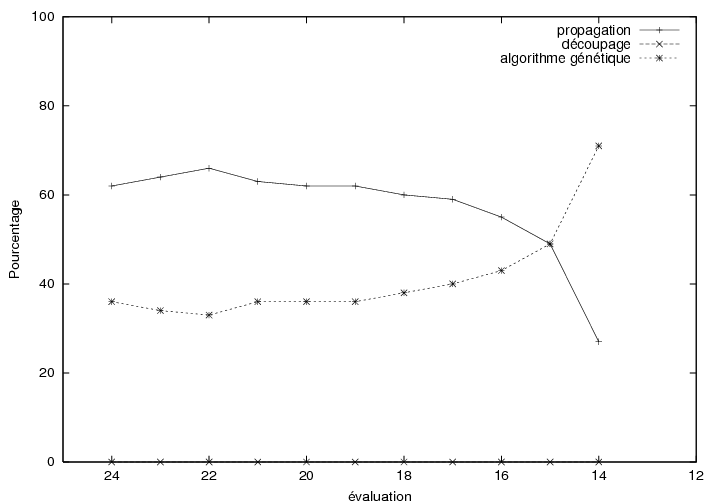
|
||||
|
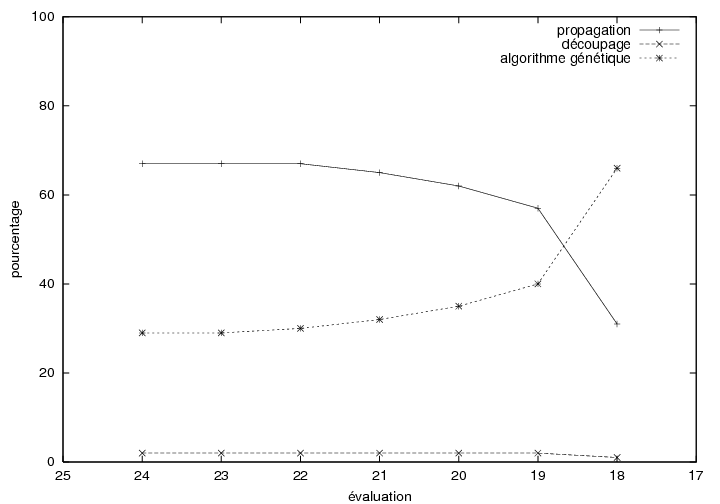
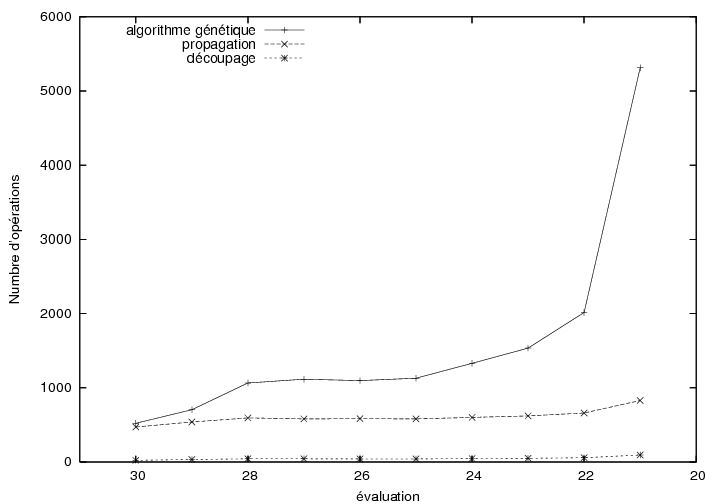
Tout d’abord, les découpages sont limités à 1% du nombre total de fonctions de bases (fonction de réduction) du fait de la complexité spatiale qu’ils génèrent. En ce qui concerne les problèmes simples (bacp8, bacp10, bacp12), au début, CP représente 70% de l’effort de recherche : la propagation de contrainte restreint l’espace de recherche. Á l’opposé, AG représente autour de 30%. Pendant cette période, trop peu de consistances locales sont atteintes, et AG ne trouve que des solutions dont le coût est supérieur à 21. Puis, à partir de la seconde moitié du processus de recherche, CP et AG convergent en terme d’efficacité : une majorité des sous-GCSP ont atteint la consistance locale et les contraintes ne réduisent plus les domaines. Á la fin, AG représente 70% de l’effort de recherche pour trouver la solution optimale. Pour ce qui est des stratégies utilisant AG ou CP uniquement, pour cette implémentation, CP n’est pas capable de trouver une solution réalisable en moins de 10 minutes. AG trouve seul la solution optimale, mais 10 fois plus lentement qu’une résolution hybride AG+CP. C’est pourquoi nous n’avons pas inclus ces résultats dans les tables. Pour le problème avec toutes les périodes réunies (bacpall), AG et CP commence par avoir une efficacité équivalente seulement, tandis que CP apparaît comme stable, une majorité des opérations sont effectuées par le processus génétique. Ceci peut s’expliquer par le fait que, dans ce cas de figure, les contraintes sont trop faibles vis-à-vis du nombre de variables et par là de la taille de l’espace de recherche engendré. Cependant, dans notre système hybride, AG semble être une méthode très efficace même si les opérateurs des contraintes n’ont pas atteint leurs points fixes.
7.4 Conclusion
Le plus intéressant dans une telle hybridation est la complétude
de l’association AG+CP, et le rôle joué par AG et CP dans le
processus de recherche (voir figures 7.6): AG
optimise les solutions (voir figure 7.1) dans un espace
de recherche devenant progressivement consistant localement (et
ainsi de plus en plus petit) par l’utilisation de la propagation
des contraintes et du découpage. De plus, le cadre présenté laisse
une grande liberté tant dans le choix des méthodes utilisées que
dans les types de problèmes abordés. Nous avons présenté au
chapitre 6 un cadre associant recherche locale,
propagation de contrainte et découpage. Or nous n’avons pas encore
considéré à ce niveau, la possibilité que les algorithmes
génétiques puissent utiliser la recherche locale. Nous souhaitons
à présent proposer un modèle général capable d’intégrer la
recherche locale, les algorithmes génétiques, la propagation de
contraintes et le découpage de manière uniforme.
Chapitre 8
Une formulation hybride
des CSP
| Dans ce chapitre, un pas de plus est fait pour l’hybridation des méthodes. En effet, le formalisme présenté ici tend à homogénéiser et simplifier toutes les notions vues jusqu’alors. Nous présentons une réunion des concepts de population et d’ensemble de SCSP dans une structure uniforme. |
8.1 Introduction
Nous avons présenté au chapitre 5 le cadre proposé par
K. Apt. Ce cadre est étendu au chapitre 6 pour y
introduire la recherche locale et le découpage des domaines. Puis
au chapitre 7, une deuxième grande famille des
méthodes incomplètes, celles des algorithmes génétiques est
intégrée. Ce chapitre propose maintenant une nouvelle formulation
du cadre théorique général pour la résolution des CSP. Cette
formulation se trouve dans un contexte d’hybridation entre :
- les méthodes à base de propagation et de découpage,
- les méthodes centrées sur le cheminement d’une configuration dans l’espace des affectations possibles,
- et des algorithmes qui manipulent un ensemble d’individus.
8.2 Un système hybride pour les CSP
Dans le modèle décrit par K. Apt, la réduction de domaine
correspond au calcul de point fixe d’un ensemble de fonctions sur
un ordre partiel. Ces fonctions, appelées fonctions de réduction
abstraient la notion de contrainte. Nous avons étendu ce cadre
pour les algorithmes génétiques et pour la recherche locale.
Maintenant, nous proposons ici, une nouvelle formulation d’un
cadre uniforme capable de modéliser un algorithme hybride de
manière plus simple.
L’idée centrale de ce système est de décomposer le processus de
résolution en fonctions de base et d’étendre les travaux de K. Apt
à la résolution par les métaheuristiques.
Ces fonctions seront alors gérées au même niveau et la résolution
sera réalisée par l’algorithme générique proposé dans
[ Apt1997]. Dans notre système, cette résolution se traduit par
une séquence de transition sur une structure de calcul.
8.2.1 Construction d’un ordre partiel
Nous utilisons les définitions déjà présentées au chapitre
5.2 concernant l’ordre partiel. Nous rappelons
qu’un ordre partiel est un couple (D,\sqsubseteq), avec D un
ensemble et \sqsubseteq une relation réflexive, antisymétrique
et transitive portant sur D. Considérons un ordre partiel
(D,\sqsubseteq), un élément d de D est alors appelé plus
petit élément si d \sqsubseteq e pour tous e ∈ D.
De plus, pour un ensemble D, on note P(D) l’ensemble
des sous-ensembles possibles de D. (P(D), ⊇ )
forme un ordre partiel, où ⊇ est la relation
d’inclusion inverse.
Considérons maintenant le produit cartésien P(D1) ×... ×P(Dn) dont les éléments sont ordonnés selon
la relation d’inclusion inverse ⊇ , telle que :
(X1,...,Xn) ⊇ (Y1,...,Yn) ssi Xi ⊇ Yi pour tout i ∈ [1..n] avec Xi,Yi ∈ P(Di).
Ceci nous fournit l’ordre partiel : (P(D1) ×... ×P(Dn), ⊇ )
Pour étendre cette relation aux CSP ; nous construisons un
ordre sur ⟨X,C,P(D1) ×... ×P(Dn)⟩ l’ensemble des CSP avec un
ensemble de variables X, un ensemble de contraintes C et un
espace de recherche P(D1) ×... ×P(Dn), équivalent à l’ensemble des CSP
possibles depuis le CSP initial ⟨X,C,D1 ×... ×Dn ⟩ à résoudre.
Le couple (⟨X,C,P(D1) ×... ×P(Dn) ⟩, \sqsubseteq) forme un ordre
partiel, la relation \sqsubseteq étant définie selon la relation inverse ensembliste
sur le dernier composant du triplet (correspondant aux
domaines).
L’ensemble (⟨X,C,P(D1) ×... ×
P(Dn) ⟩ représente celui des CSP possibles. Seulement,
gardons à l’esprit que pour une résolution complète il est souvent
nécessaire de diviser le problème en sous-problèmes (par découpage
d’un domaine ou par énumération des valeurs) et que la résolution
se fait dans ce cas, non pas sur un seul, mais sur un ensemble de
CSP. Si nous voulons considérer la résolution dans sa totalité, il
nous faut alors décrire tous les ensembles possibles de CSP.
Définition 37
Considérons l’ensemble P(P(D1) ×... ×P(Dn))
des sous-ensembles possibles de P(D1) ×... ×P(Dn). Considérons la relation \sqsubseteq sur celui-ci définie par : Étant donné deux ensembles de CSP F et Y membres de l’ensemble P(P(D1) ×... × P(Dn) avec F = {f1,...,fk} et Y = {y1,...,yl}. Le couple (F,Y) ∈ \sqsubseteq (i.e. F\sqsubseteq Y) ssi :
- ∀fi ∈ F:
- (a1) soit il existe yj ∈ Y t.q. yj = fi
- (a2) ou soit il existe yj1 ..., yjh ∈ Y t.q. Sol(fi) ⊆ Uk=1..h Sol(yjk).
- (b) et, ∀yj ∈ Y ∃fi ∈ F t.q. fi \sqsubseteq yj
- Pour prouver que nous sommes face à un semi-ordre, nous allons
démontrer que la relation d’ordre est réflexive, que
l’antisymétrie n’est pas systématique et qu’elle est transitive.
- (a1) Chaque CSP est égal à lui-même ∀fi ∈ F, fi = fi.
- (b) Une telle relation n’est pas stricte, chaque CSP est comparable à lui même : ∀fi, fi \sqsubseteq fi
- (c,a) ∀wi ∈ W.
- (c,a1) soit il existe yk ∈ Y t.q. yk = wi
- (c,a2) ou soit il existe yk1 ..., ykh ∈ Y t.q. Sol(wi) ⊆ Ul=1..h Sol(ykl).
- (c,b) et, ∀yk ∈ Y ∃wi ∈ W t.q. wi \sqsubseteq yk
- de même concernant le point (a1) de la seconde hypothèse (h2a1)
on a alors (c,a1) :∀fj ∈ F, ∃yk ∈ Y t.q. fj = yk wi = fj = yk - ou (h2a2) seconde hypothèse, ordre sur l’ensemble des solutions, dans ce cas, il existe
, par là (c,a2) :yk1 ..., ykh ∈ Y t.q. Sol(fj) ⊆
∪
l=1..hSol(ykl) Sol(wi) ⊆
∪
l=1..hSol(ykl) - et (h2a1)
donc (c,a2) :∀fjl ∃ykl ∈ Y t.q. fjl = ykl Sol(wi) ⊆
∪
l=1..hSol(ykl) - ou (h2a2) :
nous avons (c,a2)∀fjl ∃yjl1 ..., yjlk ∈ Y t.q. Sol(fjl) ⊆
∪
m=1..kSol(yjlm) Sol(wi) ⊆
∪
l=1..h(
∪
m=1..k(Sol(yjlm)))
1- Réflexivité : soit un ensemble de CSP F = {f1,...,fk}, il est comparable à lui-même
2- la non-antisymétrie est possible : Soit un ensemble de CSP F = {f1,...,fk} et un autre ensemble F’ = {f1,...,fk,fk+1} avec fk \sqsubseteq fk+1, tel qu’un CSP est ajouté à F, le résultat est que F\sqsubseteq F’ et F’\sqsubseteq F par la définition de l’ordre. Cependant F ≠ F’. Ainsi, cette relation peut ne pas satisfaire l’antisymétrie.
3- transitivité : La démonstration de la transitivité est moins directe. Prouvons que si W\sqsubseteq F (h1) et F\sqsubseteq Y(h2) alors W\sqsubseteq Y (c).
Picture Omitted
Picture Omitted
Figure 8.1: Démonstration de la transitivité
Pour en fournir la preuve, nous allons suivre la définition de l’ordre (voir figure 8.1). Nous devons prouver :
∀wi ∈ W, ∃fj ∈ F t.q. wi = fj
Étudions maintenant la seconde branche de l’arbre celle où (h1a2) la relation dans (h1) est définie avec l’item (a2), il existe :fj1 ..., fjh ∈ F t.q. Sol(wi) ⊆
∪
l=1..hSol(fjl)
d’après (h2b),∀yk ∈ Y
Mais par (h1b) pour tout fj ∈ F, il existe wi ∈ W tel que wi \sqsubseteq fj, la relation étant transitive sur l’ordre partiel (⟨X,C,P(D1) ×... ×P(Dn) ⟩, \sqsubseteq) nous obtenons que pour tout yk ∈ Y, qu’il existe un wi ∈ W t.q. wi \sqsubseteq yk Pour conclure, la relation est transitive.∃fj ∈ F t.q. fj \sqsubseteq yk
8.2.2 Fonctions de réduction de domaines
Le calcul du plus petit point fixe commun de l’ensemble de
fonctions F peut être réalisé par l’algorithme Générique
Itératif de [ Apt2003] décrit par la figure 8.2.
Dans cet algorithme, G représente l’ensemble courant des
fonctions devant être appliquées (G ⊆ F), d est un
élément d’un ensemble partiellement ordonné (les domaines dans le
cas des CSP).
GI: Algorithme Générique Itératif
d : = ⊥;
G : = F;
Tant que G ≠ Æ faire
choisir g ∈ G;
G : = G - {g};
G : = G Uactualise(G,g,d);
d : = g(d);
Fin tant que Où pour tout G,g,d, l’ensemble des fonctions actualise(G,g,d) de F est tel que :
- { f ∈ F - G | f(d) = d ∧f(g(d)) ≠ g(d)} ⊆ actualise(G,g,d).
- g(d) = d implique que actualise(G,g,d) = Æ.
- g(g(d)) ≠ g(d) implique que g ∈ actualise(G,g,d)
Les propriétés de terminaisons sont identiques à celles présentées au chapitre 5.1. Si toutes nos fonctions sont inflationnaires, monotones et que (D,\sqsubseteq) est fini, alors l’algorithme GI termine et calcul le plus petit point fixe commun des fonctions. Nous allons voir quelles sont dans notre cas les fonctions en question. Nous proposons un cadre où les fonctions se conforment à deux modèles de fonctions : échantillonnage et réduction.
8.2.3 Échantillonnage
L’échantillonnage, comme nous avons vu au chapitre
6.2, consiste à extraire depuis un CSP une
affectation complète ou partielle. L’échantillon est alors ici
considéré comme un nouveau CSP ajouté à l’ensemble. Seulement, le
fait d’ajouter un CSP à notre ensemble ne remet pas en cause la
cohérence de cet ensemble. En effet, aucune solution n’est
supprimée et aucune n’est ajoutée puisque l’échantillonnage ne
fait qu’extraire une affectation déjà présente dans un autre CSP :
|
Nous parlerons d’affectation complète si : fn+1 º ⟨Xn+1;Cn+1;Dn+1⟩ avec Dn+1 = Dn+11,...,Dn+1k et ∀i ∈ [1..k], |Dn+1i | = 1 . Ou partielle si seules certaines variables sont instanciées : fn+1 º ⟨Xn+1;Cn+1;Dn+1⟩ avec Dn+1 = Dn+11,..., Dn+1k et ∃i ∈ [1..k] tq | Dn+1i | = 1 Propriété 4 L’échantillonnage est inflationnaire x \sqsubseteq S(x) {f1, ..., fn } \sqsubseteq {f1, ..., fn,fn+1}, la preuve est directe. Propriété 5 L’échantillonnage est monotone : x \sqsubseteq y implique S(x) \sqsubseteq S(y) :
|
|
|
- Monotonie
- ∀fi ∈ F
- ∀fi ∈ F, i ≠ n+1: d’après l’hypothèse et la définition de l’ordre, les points (a1) ou (a2) sont vérifiés
- fn+1 par la définition de l’échantillonnage ∃fi t.q. fi \sqsubseteq fn+1.
Mais d’après la définition de l’ordre pour fi deux cas, soit :
(1) ∃yj ∈ Y t.q. fi = yj,
ou (2) ∃yj1, ..., yjh ∈ Y t.q. SolD(fi) ⊆ Uk=1..h SolD(yjk’).
si nous nous trouvons dans le cas (a1) alors sol(fn+1) ⊆ sol(yj) car sol(fn+1) ⊆ sol(fi) et sol(fn+1) = sol(fi)
si par contre nous sommes dans le cas (a2) alors sol(fn+1) ⊆ Uk=1..h SolD(yjk) car sol(fn+1) ⊆ sol(fi)
- ∀fi ∈ F, i ≠ n+1: d’après l’hypothèse et la définition de l’ordre, les points (a1) ou (a2) sont vérifiés
- ∀yj ∈ Y d’après l’hypothèse, il existe fi ∈ F t.q. fi \sqsubseteq yj
- ∀yj ∈ Y avec j ≠ m+1 par définition.
- ∃yl t.q. ym+1 \sqsubseteq yl mais ∃i t.q. fi \sqsubseteqyj donc fi \sqsubseteq ym+1
- ∀yj ∈ Y avec j ≠ m+1 par définition.
- ∀fi ∈ F
8.2.4 Réduire
Réduire l’espace de recherche est essentiel pour obtenir une
solution par une approche complète, dans le contexte des CSP, cela
se traduit par une suppression de valeurs dans les domaines, et ce
en étant sûr de ne pas perdre de solutions. Réduire signifie
réduire les domaines, mais aussi plus largement, réduire le
problème en supprimant les affectations de l’espace de recherche
qui ne sont pas solution.
|
8.3 Fonction de réduction
Nos deux principes échantillonnage et reduire vont
nous permettent de définir un ensemble de fonctions. Nous pouvons
dorénavant construire des combinaisons pour décrire à la fois le
fonctionnement des méthodes complètes, mais aussi celui des
méthodes incomplètes.
8.3.1 La réduction de domaine
La réduction de domaine (DR) correspond à la
consistance de n ud, consistance d’arc et la consistance
hyper-arc. Le filtrage des valeurs inconsistantes se concrétise
par une réduction des domaines et donc entre dans le cadre grâce à
la fonction réduire. Á l’aide du schéma de fonction de
réduction elle se défini par :
|
→DR { ⟨X,C,D ⟩1, ..., ⟨X,C,D’⟩i,...,⟨X,C,D ⟩n }
où D’ ⊆ D pour le CSP ⟨X,C,D ⟩i.
Ainsi DR correspond à une ou plusieurs applications de la
fonction de base R, ceci pour modéliser le fait que bien
souvent, lorsqu’un opérateur spécifique de réduction est défini
pour une contrainte, il ne contente pas de réduire un seul
domaine. Prenons à titre d’exemple la procédure AllDiff (voir
chapitre 2.4.1), pour tout domaine singleton, une
réduction des autres domaines est appliquée.
8.3.2 Le découpage
Le découpage (SP) est le résultat du
fractionnement d’un domaine, et formellement, pour un domaine de
taille m, est vu comme m échantillons générés et par la
réduction (suppression) du CSP original tout en conservant les
solutions. Le découpage remplace ainsi le problème initial par un
ensemble de sous problèmes :
|
→SP {⟨X,C,D ⟩1, ..., ⟨X,C,D⟩i1,...,⟨X,C,D ⟩ih,...,⟨X,C,D ⟩n }
où D1 = Uj ∈ [1..h] Dij{⟨X,C,D ⟩1, ..., ⟨X,C,D⟩i,...,⟨X,C,D ⟩n }
→S{ ⟨X,C,D ⟩1, ..., ⟨X,C,D⟩i1,...,⟨X,C,D ⟩ih,...,⟨X,C,D ⟩n }
où D1 = Uj ∈ [1..h] Dij
L’application d’un découpage SP conserve l’ensemble des
solutions de par les propriétés de S et R.
8.3.3 La recherche locale
Un chemin de recherche locale (LS) a pour but de générer
de nouveaux échantillons et de se déplacer vers un voisin choisi.
De manière formelle cela correspond à m échantillonnage (générer
le voisinage) suivi de m réduction (choisir le voisin).
|
→LS { ⟨X,C,D1 ⟩1, ..., ⟨X,C,D’i ⟩i,...,⟨X,C,Dn ⟩n }
où il existe ⟨X,C,Dj ⟩ t.q. D’i ⊂ Dj
Cette combinaison modélise bien la recherche locale puisque dans
une recherche locale (voir chapitre 3), un
certain nombre de voisins sont générés autour de la configuration
courante, puis parmi ces voisins un seul est choisi, les autres
sont supprimés et une trace de la recherche est conservée (m-1).
8.3.4 L’évolution
Pour décrire les algorithmes génétiques avec nos deux éléments de
base que sont R et S, nous devons décrire tous les
opérateurs génétiques de manière indépendante. L’évolution peut se
diviser en trois mouvements : le croisement CR correspond à un
échantillonnage, la mutation MU, elle, est un échantillonnage
suivi d’une réduction quant à la sélection SE (d’une
sous-population). Elle équivaut à un nombre s de réductions. La
construction d’un algorithme génétique spécifique se fait alors
par l’utilisation de ces trois fonctions.
|
|
|
8.4 Conclusion
Les techniques hybrides nous permettent d’atteindre un degré élevé
d’efficacité pour résoudre des problèmes combinatoires et
d’optimisation complexes. Dans ce chapitre, nous présentons un
cadre général approprié pour modéliser la résolution par
l’algorithme hybride. Nous avons montré que ce travail peut servir
de base pour la formulation d’une intégration des algorithmes
génétiques, de la recherche locale et de la programmation par
contraintes avec leurs principales propriétés.
Ce cadre fournira un environnement uniforme pour classifier,
comparer, analyser, décrire et contrôler des algorithmes hybrides
au niveau le plus basique.
Principales contributions
Cette thèse s’articule autour d’une modélisation des mécanismes de résolution des problèmes de satisfaction de contraintes.
Nous avons proposé dans un premier temps une intégration de la recherche locale au sein d’un cadre préexistant, initialement conçu pour décrire la propagation de contrainte. Ce cadre est alors étendu pour considérer d’une part le découpage des domaines et d’autre part les mécanismes inhérents à la résolution par les méthodes de recherche locale. Ce cadre repose sur un nouveau modèle, celui de CSP échantillonné. Nous avons alors confronté ce modèle à diverses expérimentations dans lesquelles une résolution hybride s’avère efficace pour résoudre des problèmes de satisfaction de contraintes classiques. L’homogénéisation des concepts de résolution, nous a permis de nous dégager d’une hiérarchie, processus maître processus esclave, pour modéliser des algorithmes de résolution hybride.
Dans un second temps, nous avons envisagé une fusion des méthodes complètes avec les algorithmes génétiques. Cette association a permis en outre, la résolution d’un problème d’optimisation sous contraintes. Nous avons corollairement identifié les interactions entre l’évolution d’une population et la réduction de l’espace de recherche dont elle est issue. Nous avons souligné par des expérimentations la complémentarité de ces méthodes.
Cette étude des différentes hybridations entre les méthodes complètes et incomplètes a nécessité une part non négligeable de développement. En effet, nous avons développé notre propre solveur de manière à bien étudier les comportements des méthodes au plus bas niveau. Ce solveur a évolué au même titre que les niveaux d’hybridations jusqu’à la résolution des problèmes d’optimisation sous contraintes.
Enfin, nous avons montré que ce travail peut servir de base pour une intégration des méthodes de recherche locale, des algorithmes génétiques et de la programmation par contraintes dans le but de préciser les connexions entre des techniques incomplètes et complètes et d’en extraire les principales propriétés. Nous avons montré de même que l’intégration de ces techniques peut se faire dans le cadre des itérations chaotiques. Cependant, une nouvelle structure ordonnée de calculs est alors requise ainsi que des fonctions de réductions adaptées.
Les frontières existantes entre les méthodes complètes et incomplètes, même si elles existent toujours, peuvent être atténuées dans notre approche, quand il s’agit de fournir des preuves sur la correction, la complétude et la fiabilité des méthodes hybrides.
Perspectives de recherches
Dans un futur proche, nous envisageons le développement de notre solveur vers une librairie C++ capable de calquer le modèle théorique pour offrir aux utilisateurs la possibilité de tester et d’imaginer une gamme très large de combinaisons de ces méthodes.Il nous reste beaucoup d’extensions du modèle à explorer, nous projetons notamment une adaptation de la méthode Go With the Winners [ Aldous and Vazirani1994] aux arbres de recherche des méthodes hybrides. Ceci peut passer par une distribution de la recherche en différents points et par une communication via les particules échangées.
Nous souhaitons aussi développer des outils d’apprentissage capables de nous soustraire aux difficultés liées à la définition des paramètres et plus généralement, aux stratégies.
Il est sans doute encore utopique d’envisager un système intelligent capable de s’adapter à toute sorte de problèmes, d’en déduire la stratégie optimale de résolution et de l’expliquer à l’utilisateur.
Liste des figures
List of Figures
1.1 Exemple de problème de coloriage de carte et son équivalent en problème de satisfaction de contraintes1.2 Une solution pour le placement de 8 reines sur un échiquier
1.3 Solution d’une règle de Golomb à 4 marques
1.4 Carré magique d’ordre 4
1.5 Quels sont les chiffres associés aux lettres S E N D M O R Y?
1.6 Solution du nombre de Langford (2,4)
1.7 Solution du nombre de Langford (3,9)
1.8 Pouvons nous trouver un chemin qui partant de x2 qui passe par tous les sommets et ce pour un coût inférieur 40 : La solution x2, x4, x6, x5, x3, x4, x1 semble adéquate.
2.1 Arbre de recherche du backtracking
2.2 CSP non consistant
2.3 Applications successives de la procédure Révise_arc
2.4 Arbre de recherche : propagation + énumération
2.5 Arbre de recherche du Forward Checking
2.6 Arbre de recherche du Full Look Ahead
3.1 Chemin de recherche locale
3.2 Minimum local et global
3.3 Minimum local et Recuit Simulé
3.4 Diversification avec une liste tabou
3.5 Exemple de croisement uniforme
3.6 Exemple de mutation sur un gène
3.7 Exemple de sélections
3.8 Mécanisme général des algorithmes génétiques.
4.1 Classification des combinaisons exactes/métaheuristiques
4.2 Processus de recherche LDS
5.1 Modèle abstrait
5.2 Exemple d’ordre partiel
6.1 Processus hybride de résolution sur un ordre partiel
6.2 Fonction de sélection
6.3 Interaction entre voisinage et espace réduit
6.4 Exemple de grille de Sudoku
6.5 Coût d’une solution : nombre de Langford (Depth-First)
6.6 Coût d’une solution : Send+More=Money (Depth-First)
7.1 Algorithme génétique pour l’optimisation
7.2 Schéma général d’application des fonctions pour l’hybridation CP+GA
7.3 Exemple de distribution des cours.
7.4 fonctions ga
7.5 Évolution des fonctions de coût
7.6 Évolution de CP vs AG durant le processus d’optimisation
8.1 Démonstration de la transitivité
8.2 L’algorithme générique itératif
Listes des tables
List of Tables
6.1 Résultats du Sudoku par différentes méthodes de recherche6.2 Meilleures gammes du taux de propagation pour calculer une solution
6.3 Nombre moyen d’opérations pour calculer une première solution
7.1 Résultats en seconde avec lp_solve
7.2 Résultats avec GA+CP
Listes des algorithmes
Liste des publications personnelles
Conférences internationales avec comité de sélection
- Tony Lambert, Carlos Castro, Eric Monfroy et Frédéric Saubion. Solving the Balanced Academic Curriculum Problem with an Hybridization of Genetic Algorithm and Constraint Propagation. International Conference on Artificial Intelligence and Soft Computing (ICAISC’06). pp 410-419, Volume 4029 of Lecture Notes in Artificial Intelligence, Zakopane, Poland, Springer Verlag 2006.
- Tony Lambert, Eric Monfroy et Frédéric Saubion. Solving Sudoku with Local Search : A Generic Framework. International Conference on Computational Science (ICCS 2006), pp 641-648, Volume 3991 of Lecture Notes in Computer Science, May 28-31, Reading, UK, Springer Verla 2006.
- Eric Monfroy, Frédéric Saubion et Tony Lambert. Hybrid CSP Solving, Proceeding of 5th International Workshop Frontiers of Combining Systems (FroCoS), pp 138-167, Bernhard Gramlich, Volume 3717 of Lecture Notes in Computer Science, Vienna, Austria, September 19-21, Springer 2005, invited paper.
- Tony Lambert, Carlos Castro, Eric Monfroy, María Cristina Riff et Frédéric Saubion. Hybridization of Genetic Algorithms and Constraint Propagation for the BACP, Logic Programming, 21st International Conference, ICLP 2005, pp 421-423, Volume 3668 of Lecture Notes in Computer Science, spain, October 2 - 5, M. Gabbrielli and G. Gupta, Springer, 2005.
- Tony Lambert, Eric Monfroy et Frédéric Saubion. Solving Strategies using a Hybridization Model for Local Search and Constraint Propagation. Proceedings of the 2005 ACM Symposium on Applied Computing (SAC), Santa Fe, New Mexico, USA. pages 398-403, Hisham Haddad and Lorie M. Liebrock and Andrea Omicini and Roger L. Wainwright, Santa Fe, New Mexico, USA, March 13-17, ACM, 2005.
- Eric Monfroy, Frédéric Saubion et Tony Lambert. On Hybridization of Local Search and Constraint Propagation, Logic Programming, 20th International Conference, ICLP 2004, pages = 299-313, Volume 3132 of Lecture Notes in Computer Science, Bart Demoen and Vladimir Lifschitz, Saint-Malo, France, September 6-10, Springer Verlag, 2004.
Ateliers internationaux avec comité de sélection
- Tony Lambert, Carlos Castro, Eric Monfroy, María Cristina Riff et Frédéric Saubion. Hybridization of Genetic Algorithms and Constraint Propagation : application to the Balanced Academic Curriculum Problem, In Proceeding of the 5th Workshop on Cooperative Solvers in Constraint Programming (COSOLV), Sitges, Spain, October, 2005.
- Tony Lambert, Eric Monfroy et Frédéric Saubion. Hybridization Strategies for Local Search and Constraint Propagation, Proceeding of the 4th Workshop on Cooperative Solvers in Constraint Programming (COSOLV), Toronto, Canada, September, 2004.
Conférences nationales avec comité de sélection
- Tony Lambert, Carlos Castro, Eric Monfroy, María Cristina Riff et Frédéric Saubion. Résolution du problème d’équilibrage des diplômes grâce à l’hybridation d’algorithmes génétiques et de la propagation de contraintes, Actes des 1ères Journées Francophones de Programmation par Contraintes (JFPC’2005),pp 423-426, C. Solnon, 2005.
- Hervé Deleau, Tony Lambert, Eric Monfroy et Frédéric Saubion. Iterations chaotiques pour l’hybridation propagation de contraintes/recherche locale, Programmation en logique avec contraintes, JFPLC 2004, Frédéric Mesnard, pp 221-237, 21, 22 et 23 Juin, Angers, France, Hermès, 2004.
Références bibliographiques
- [ Aarts and Lenstra1997]
- E. Aarts and J.K. Lenstra, editors. Local Search in Combinatorial Optimization. John Wiley and Sons, 1997.
- [ Aggoun and Beldiceanu1991]
- A. Aggoun and N. Beldiceanu. Overview of the chip compiler system. In K. Furukawa, editor, Logic Programming, Proceedings of the Eigth International Conference, pages 775-789. MIT Press, 1991.
- [ Ahuja et al. 2002]
- R. K. Ahuja, Ö. Ergun, J. B. Orlin, and A. P. Punnen. A survey of very large-scale neighborhood search techniques. Discrete Appl. Math., 123(1-3):75-102, 2002.
- [ Aldous and Vazirani1994]
- D.J. Aldous and U. Vazirani. Go with the winners algorithms. In Proc. 35th Symp. Foundations of Computer Sci., pages 492-501. IEEE Computer Soc. Press, 1994.
- [ Allen1983]
- J. F. Allen. Maintaining knowledge about temporal intervals. Commun. ACM, 26(11):832-843, 1983.
- [ Allen1984]
- J. F. Allen. Towards a general theory of action and time. Artif. Intell., 23(2):123-154, 1984.
- [ Applegate et al. 1998]
- D. Applegate, R. Bixby, V. Chvátal, and W. Cook. On the solution of traveling salesman problems. Documenta Mathematica, Extra Volume Proceedings ICM III (1998):645-656, 1998.
- [ Apt1997]
- K. Apt. From chaotic iteration to constraint propagation. In 24th International Colloquium on Automata, Languages and Programming (ICALP ’97), number 1256 in LNCS, pages 36-55. Springer, 1997. invited lecture.
- [ Apt1999]
- K. Apt. The rough guide to constraint propagation. In Springer-Verlag, editor, Proc. of the 5th International Conference on Principles and Practice of Constraint Programming (CP’99), volume 1713 of LNCS, pages 1-23, 1999. (Invited lecture).
- [ Apt2003]
- K. Apt. Principles of Constraint Programming. Cambridge University Press, 2003.
- [ Bäck et al. 2001]
- T. Bäck, J. M. de Graaf, J. N. Kok, and W. A. Kosters. Theory of genetic algorithms. In Gheorghe Paun, Grzegorz Rozenberg, and Arto Salomaa, editors, Current Trends in Theoretical Computer Science, Entering the 21th Century, pages 546-578. World Scientific, 2001.
- [ Baker1985]
- J. E. Baker. Adaptive selection methods for genetic algorithms. In ICGA, pages 101-111, 1985.
- [ Benhamou1996]
- F. Benhamou. Heterogeneous constraint solving. In M. Hanus and M. Rodriguez Artalejo, editors, Proceedings of the Fifth international conference on algebraic and logic programming, ALP’96, number 1139 in LNCS. Springer-Verlag, 1996.
- [ Bessière and Régin2001]
- C. Bessière and J.C. Régin. Refining the basic constraint propagation algorithm. pages 309-315, 2001.
- [ Bessière et al. 1999]
- C. Bessière, E.C. Freuder, and J.C. Régin. Using constraint metaknowledge to reduce arc consistency computation. AAAI, pages 125-148, 1999.
- [ Bessière1994]
- C. Bessière. Arc-consistency and arc-consistency again. Artificial Intelligence, pages 179-190, 1994.
- [ Bruynooghe1985]
- M. Bruynooghe. Graph coloring and constraint satisfaction. Technical Report CW 44, Katholieke Universiteit Leuven, 1985.
- [ Burke et al. 2001]
- E. K. Burke, P. I. Cowling, and R. Keuthen. Effective local and guided variable neighbourhood search methods for the asymmetric travelling salesman problem. In Proceedings of the EvoWorkshops on Applications of Evolutionary Computing, pages 203-212, London, UK, 2001. Springer-Verlag.
- [ Castro and Manzano2001]
- C. Castro and S. Manzano. Variable and value ordering when solving balanced academic curriculum problems. In Proceedings of 6th Workshop of the ERCIM WG on Constraints. CoRR cs.PL/0110007, 2001.
- [ Chakravarthy1979]
- I. Chakravarthy. A generalized line and junction labeling scheme with applications to scene analysis. IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 1, pages 202-205, 1979.
- [ Chazan and Miranker1969]
- D. Chazan and W. L. Miranker. Chaotic relaxation. Linear algebra and its applications, 2:199-222, 1969.
- [ Colmerauer1990]
- A. Colmerauer. An introduction to prolog iii. CACM, 33(7):69-90, Jul 1990.
- [ Colmerauer1994]
- A. Colmerauer. Spécifications de prolog iv. Tech. rept., GIA, Faculté des Sciences de Luminy, Marseille, France, 1994.
- [ Congram2000]
- R. K. Congram. Polynomially Searchable Exponential Neighbourhoods for Sequencing Problems in Combinatorial Optimisation. Phd thesis, University of Southampton, Faculty of Mathematical Studies, UK, 2000.
- [ Cooper1989]
- M. C. Cooper. An optimal k-consistency algorithm. Artif. Intell., 41(1):89-95, 1989.
- [ Cotta and Troya2003]
- C. Cotta and J. M. Troya. Embedding branch and bound within evolutionary algorithms. Appl. Intell., 18(2):137-153, 2003.
- [ Cousot and Cousot1977]
- P. Cousot and R. Cousot. Automatic synthesis of optimal invariant assertions: mathematical foundations. In ACM Symposium on Artificial Intelligence & Programming Languages, Rochester, NY, ACM SIGPLAN Not. 12(8):1-12, August 1977.
- [ Cousot1978]
- P. Cousot. Méthodes itératives de construction et d’approximation de points fixes d’opérateurs monotones sur un treillis, analyse sémantique de programmes. Thèse d’état en sciences mathématiques, Université scientifique et medicale de Grenoble, France, 1978.
- [ Croker and Dhar1993]
- A. E. Croker and V. Dhar. A knowledge representation for constraint satisfaction problems. IEEE Transactions on Knowledge and Data Engineering, 5(5):740-752, 1993.
- [ Davis and Rosenfeld1981]
- L. S. Davis and A. Rosenfeld. Cooperating processes for low-level vision: A survey. Artificial Intelligence, 17(1-3):245-263, août 1981.
- [ de Kleer and Syssman1980]
- J. de Kleer and G. J. Syssman. Propagation of constraints applied to circuit synthesis. Circuit Theory and Applications, 8:127-144, 1980.
- [ Dechter and Dechter1988]
- R. Dechter and A. Dechter. Belief maintenance in dynamic constraint networks. Proceedings of the Seventh National Conference on Artificial Intelligence, pages 37-42, 1988.
- [ Dechter and Meiri1989]
- R. Dechter and I. Meiri. Experimental evaluation of preprocessing techniques in constraint satisfaction problems. In Proc. of the 11th IJCAI, pages 271-277, Detroit, MI, 1989.
- [ Dechter et al. 1991]
- R. Dechter, I. Meiri, and J. Pearl. Temporal constraint networks. Artif. Intell., 49(1-3):61-95, 1991.
- [ Dechter1987]
- R. Dechter. A constraint-network approach to truth-maintenance. Technical Report Technical Report 870009 (R-80), UCLA Cognitive Systems Laboratory, 1987.
- [ Dechter2003]
- Rina Dechter. Constraint Processing. Morgan Kaufmann, May 2003.
- [ Deleau2005]
- H. Deleau. Approches hybrides pour les problèmes CSP. PhD thesis, Université d’Angers, PhD thesis, 2005.
- [ Dhar and Ranganathan1990]
- V. Dhar and N. Ranganathan. Integer programming vs. expert systems: an experimental comparison. Commun. ACM, 33(3):323-336, 1990.
- [ Eastman1972]
- C. M. Eastman. Preliminary report on a system for general space planning. Commun. ACM, 15(2):76-87, 1972.
- [ Eiben et al. 1994]
- A. E. Eiben, P.-E. Raué, and Z. Ruttkay. Genetic algorithms with multi-parent recombination. In PPSN III: Proceedings of the International Conference on Evolutionary Computation. The Third Conference on Parallel Problem Solving from Nature, volume 866 of Lecture Notes in Computer Science, pages 78-87. Springer, 1994.
- [ Fages et al. 1998]
- F. Fages, J. Fowler, and T. Sola. Experiments in reactive constraint logic programming. Journal of Logic Programming, 37(1-3):185-212, 1998.
- [ Fages1996]
- F. Fages. Programmation Logique par Contraintes. Ellipse, 1996.
- [ Feltl and Raidl2004]
- H. Feltl and G. R. Raidl. An improved hybrid genetic algorithm for the generalized assignment problem. In Hisham Haddad, Andrea Omicini, Roger L. Wainwright, and Lorie M. Liebrock, editors, in Proc. the 2004 ACM Symposium on Applied Computing (SAC), Nicosia, Cyprus, March 14-17, pages 990-995. ACM, 2004.
- [ Feo and Resende1995]
- T. A. Feo and M. G. C. Resende. Greedy randomized adaptive search procedures. Journal of Global Optimization, 6:109-133, 1995.
- [ Fikes1970]
- R. Fikes. Ref-arf: A system for solving problems stated as procedures. Artifical Intelligence, 1(1):27-120, 1970.
- [ Focacci et al. 2002]
- F. Focacci, F. Laburthe, and A. Lodi. Local search and constraint programming. In Fred Glover and Gary Kochenberger, editors, Handbook of Metaheuristics. Kluwer, 2002.
- [ Fox et al. 1989]
- M. S. Fox, N. Sadeh, and C. Baykan. Constrained heuristic search. In Proceedings of the Eleventh International Joint Conference on Artificial Intelligence, pages 309-315, Detroit, MI, August 1989.
- [ Fox1987]
- M. S. Fox. Constraint-directed Search: A Case Study of Job-Shop Scheduling. Morgan Kaufmann Publishers, 1987.
- [ Frayman and Mittal1987]
- F. Frayman and S. Mittal. Cossack : A constraints-based expert system for configuration tasks. Knowledge-Based Expert Systems in Engineering: Planning and Design, pages 143-166, 1987.
- [ Fruewirth and Abdennadher2003]
- T. Fruewirth and S. Abdennadher. Essentials of Constraint Programming. Springer, 2003.
- [ Garey and Johnson1978]
- Michael R. Garey and David S. Johnson. Computers and Intractability , A Guide to the Theory of NP-Completeness. W.H. Freeman & Company, San Francisco, 1978.
- [ Gaspero and Schaerf2003]
- L. Di Gaspero and A. Schaerf. Easylocal++: an object-oriented framework for the flexible design of local-search algorithms. Softw. Pract. Exper., 33(8):733-765, 2003.
- [ Geffner and Pearl1987]
- H. Geffner and J. Pearl. An improved constraint-propagation algorithm for diagnosis. In Proc. of the 10th IJCAI, pages 1105-1111, Milan, Italy, 1987.
- [ Gent et al. ]
- I. Gent, T. Walsh, and B. Selman. http://www.4c.ucc.ie/ tw/csplib/, funded by the UK Network of Constraints.
- [ Ginsberg and Harvey1990]
- M. L. Ginsberg and W. D. Harvey. Iterative broadening. In Proceedings of AAAI-91, 1990.
- [ Glover and Laguna1997]
- F. Glover and M. Laguna. Tabu Search. Kluwer Academic Publishers, 1997.
- [ Glover1977]
- F. Glover. Heuristics for integer programming using surrogate constraints. Decision Sciences, 8(1):156-166, 1977.
- [ Glover1986]
- F. Glover. Future paths for integer programming and links to artificial intelligence. Computers and Operations Research, 13:533-549, 1986.
- [ Goldberg1989a]
- D. E. Goldberg. Genetic Algorithms in Search, Optimization and Machine Learning. Addison-Wesley Longman Publishing Co, Inc, 1989.
- [ Goldberg1989b]
- D.E. Goldberg. Genetic Algorithms for Search, Optimization, and Machine Learning. Reading, MA:Addison-Wesley, 1989.
- [ Gusgen and Hertzberg1988]
- H. W. Gusgen and J. Hertzberg. Some fundamental properties of local constraint propagation. Artif. Intell., 36(2):237-247, 1988.
- [ Hao et al. 1999]
- J. K. Hao, P. Galinier, and M. Habib. Metaheuristiques pour l’optimisation combinatoire et l’affectation sous contraintes. Revue d’Intelligence Artificielle, 13, 1999.
- [ Haralick and Elliott1980]
- R. M. Haralick and G. L. Elliott. Increasing tree search efficiency for constraint satisfaction problems. Artif. Intell., 14(3):263-313, 1980.
- [ Haralick et al. 1978]
- R. M. Haralick, L. S. Davis, A. Rosenfeld, and D. L. Milgram. Reduction operations for constraint satisfaction. Information Science, 14(3):199-219, 1978.
- [ Harvey and Ginsberg1995]
- W. D. Harvey and M. L. Ginsberg. Limited discrepancy search. In Proc. of the 14th IJCAI, pages 607-613, Montreal, Canada, 1995.
- [ Holland1975a]
- J. H. Holland. Adaptation in Natural and Artificial Systems. University of Michigan Press, 1975.
- [ Holland1975b]
- J.H. Holland. Adaptation in Natural and Artificial Systems. University of Michigan Press, 1975.
- [ ILOG2000]
- ILOG. ILOG Solver 5.0:Reference Manual. ILOG S.A., Gentilly, France, 2000.
- [ Jaffar and Lassez1987]
- J. Jaffar and J.-L. Lassez. Constraint logic programming. In POPL ’87: Proceedings of the 14th ACM SIGACT-SIGPLAN symposium on Principles of programming languages, pages 111-119, New York, NY, USA, 1987. ACM Press.
- [ Jussien and Lhomme2002]
- N. Jussien and O. Lhomme. Local search with constraint propagation and conflict-based heuristics. Artificial Intelligence, 139(1):21-45, 2002.
- [ Kirkpatrick et al. 1983]
- S. Kirkpatrick, C. D. Gelatt, and M. P. Vecchi. Optimization by simulated annealing. Science, Number 4598, 13 May 1983, 220, 4598:671-680, 1983.
- [ Klau et al. 2004]
- G. Klau, I. Ljubi\’c, A. Moser, P. Mutzel, P. Neuner, U. Pferschy, and R. Weiskircher. Combining a memetic algorithm with integer programming to solve the prize-collecting steiner tree problem. In K. Deb, editor, Genetic and Evolutionary Computation - GECCO-2004, Part I, volume 3102 of Lecture Notes in Computer Science, pages 1304-1315, Seattle, WA, USA, 26-30 June 2004. Springer-Verlag.
- [ Krajecki et al. 2005]
- M. Krajecki, O. Flauzac, Ch. Jaillet, P.-P. Mérel, and R. Tremblay. Solving an open Instance of the Langford Problem using CONFIIT: a Middleware for Peer-to-Peer Computing. Parallel Processing Letters, 2005.
- [ Kumar1992]
- V. Kumar. Algorithms for constraint-satisfaction problems: A survey. AI Magazine, 13(1):32-44, 1992.
- [ Laburthe and Caseau2002]
- F. Laburthe and Y. Caseau. Salsa: A language for search algorithms. Constraints, 7(3-4):255-288, 2002.
- [ Laburthe2000]
- F. Laburthe. CHOCO: implementing a cp kernel. In CP’00 Post Conference Workshop on Techniques for Implementing Constraint Programming Systems - TRICS, 2000.
- [ Lardeux et al. 2005]
- Frédéric Lardeux, Frédéric Saubion, and Jin-Kao Hao. Three truth values for the sat and max-sat problems. In Proc. of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI’05), Lecture Notes in Computer Science, Edinburgh, Scotland, aug 2005. Springer.
- [ Mackworth1977]
- A.K. Mackworth. Consistency in networks of relations. Artificial Intelligence, 8, 1977.
- [ Mackworth1992]
- A. K. Mackworth. Constraint satisfaction. In S.C. Shapiro, editor, Encyclopedia of Artificial Intelligence, volume 1, pages 285-293. Wiley Interscience, New York, 1992.
- [ Madeline2002]
- B. Madeline. Algorithmes évolutionnaires et résolution de problèmes de satisfaction de contraintes en domaines finis. Thèse de doctorat, Université de Nice, Sophia Antipolis, Décembre 2002. Projet COPRIN.
- [ Marino et al. 1999]
- A. Marino, A. Prugel-Bennett, and C. Glass. Improving graph colouring with linear programming and genetic algorithms. In Proceedings of EUROGEN99, Jyvaskyla, Finland, pp. 113-118., 1999.
- [ Mariott and Stuckey1998]
- K. Mariott and P. Stuckey. Programming with Constraints, An introduction. MIT Press, 1998.
- [ McGregor1979]
- J. J. McGregor. Relational consistency algorithms and their application in finding subgraph and graph isomorphisms. Information Sciences, 19:229-250, 1979.
- [ Meyer and Jaumard2006]
- C. Meyer and B. Jaumard. Equivalence of some lp-based lower bounds for the golomb ruler problem. Discrete Applied Mathematics, 154(1):120-144, 2006.
- [ Michalewicz1996]
- Z. Michalewicz. Genetic Algorithms + Data Structures = Evolution Programs. Springer Verlag, 1996.
- [ Michel and Hentenryck1997]
- Laurent Michel and Pascal Van Hentenryck. Localizer: A modeling language for local search. In Proc. of the 1997 International Conference on Constraint Programming, 1997.
- [ Mladenovi\’c and Hansen1997]
- N. Mladenovi\’c and P. Hansen. Variable Neighborhood Search. Computers and Operations Research, 24(11):1097-1100, 1997.
- [ Mohr and Henderson1986]
- R. Mohr and T.C. Henderson. Arc and path consistency revisited. Artificial Intelligence, 28:225-233, 1986.
- [ Nadel1988]
- B. A. Nadel. Tree search and arc consistency in constraint satisfaction algorithms. Search in Artificial Intelligence, pages 287-342, 1988.
- [ Nadel1990]
- B. A. Nadel. Some applications of the constraint satisfaction problem. In In AAAI-90 Workshop on Constraint Directed Reasoning Working Notes, Boston, Mass., 1990.
- [ Nagar et al. 1995]
- A. Nagar, S. S. Heragu, and J. Haddock. A combined branch-and-bound and genetic algorithm based approach for a flowshop scheduling problem. Annals of Operations Research, Volume 63, Number 3:397 - 414, 1995.
- [ Navinchandra1991]
- D. Navinchandra. Exploration and innovation in design: towards a computational model. Springer-Verlag New York, Inc., New York, NY, USA, 1991.
- [ Neveu et al. 2004]
- B. Neveu, G. Trombettoni, and F. Glover. Idwalk : A candidate list strategy with a simple diversification device. In Principles and Practice of Constraint Programming, CP’04, LNCS. Springer, 2004.
- [ Papadimitriou1994]
- C. H. Papadimitriou. Computational Complexity. Addison-Wesley Publishing Company, 1994.
- [ Pesant and Gendreau1996]
- G. Pesant and M. Gendreau. A view of local search in constraint programming. In E. Freuder, editor, Proceedings of the Second International Conference on Principles and Practice of Constraint Programming, number 1118 in LNCS, pages 353-366. Springer, 1996.
- [ Petrie et al. 1989]
- C. Petrie, R. Causey, D. Steiner, and V. Dhar. A planning problem: Revisable academic course scheduling. Technical Report Technical Report AI-020-89, MCC, Austin,TX, 1989.
- [ Prestwich2000]
- S. Prestwich. A hybrid search architecture applied to hard random 3-sat and low-autocorrelation binary sequences. In R. Dechter, editor, Principles and Practice of Constraint Programming - CP 2000, number 1894 in LNCS, pages 337-352. Springer, 2000.
- [ Prosser1989]
- P. Prosser. A reactive scheduling agent. In Proc. of the 11th IJCAI, pages 1004-1009, Detroit, MI, 1989.
- [ Puchinger et al. 2004]
- J. Puchinger, G. R. Raidl, and G. Koller. Solving a real-world glass cutting problem. In Jens Gottlieb and Günther R. Raidl, editors, Evolutionary Computation in Combinatorial Optimization - EvoCOP 2004, volume 3004 of LNCS, pages 165-176, Coimbra, Portugal, 5-7 April 2004. Springer Verlag.
- [ Régin1994]
- J. C. Régin. A filtering algorithm for constraints of difference in csps. In AAAI ’94: Proceedings of the twelfth national conference on Artificial intelligence (vol. 1), pages 362-367, Menlo Park, CA, USA, 1994. American Association for Artificial Intelligence.
- [ Riff Rojas1996]
- M. C. Riff Rojas. From quasi-solutions to solution: An evolutionary algorithm to solve csp. In Proceedings of the Second International Conference on Principles and Practice of Constraint Programming, Cambridge, Massachusetts, USA, August 19-22, volume 1118 of Lecture Notes in Computer Science, pages 367-381. Springer, 1996.
- [ Rit1986]
- J. F. Rit. Propagating temporal constraints for scheduling. In Proceedings of AAAI-86, Philadelphia, Pa., pages 383-388. AAAI, August 1986.
- [ Shaw1998]
- P. Shaw. Using constraint programming and local search methods to solve vehicle routing problems. In M. Maher and J.F. Puget, editors, Principles and Practice of Constraint Programming - CP98, 4th International Conference, number 1520 in LNCS, pages 417-431. Springer, 1998.
- [ Stefik1981]
- M. J. Stefik. Planning with constraints (molgen part 1). Artificial Intelligence, 16(2):111-140, 1981.
- [ Tam and Stuckey1999]
- V. Tam and P.J. Stuckey. Improving evolutionary algorithms for efficient constraint satisfaction. The International Journal on Artificial Intelligence Tools, 2(8), 1999.
- [ Thierens and Goldberg1994]
- D. Thierens and D. E. Goldberg. Convergence models of genetic algorithm selection schemes. In PPSN III: Proceedings of the International Conference on Evolutionary Computation. The Third Conference on Parallel Problem Solving from Nature, volume 866 of Lecture Notes in Computer Science, pages 119-129. Springer, 1994.
- [ Tsang1987]
- E. P. K. Tsang. The consistent labeling problem in temporal reasoning. In Proceedings of the 6th National Conference on Artificial Intelligence, AAAI’87, pages 251-255, 1987.
- [ Tsang1993]
- E. P. K Tsang. Foundations of Constraint Satisfaction. Academic Press, London, 1993.
- [ Ullmann1976]
- J. R. Ullmann. An algorithm for subgraph isomorphism. J. ACM, 23(1):31-42, 1976.
- [ van Hentenryck and Michel2005]
- P. van Hentenryck and L. Michel. Constraint-based local search. Cambridge, Mass. [u.a.] : MIT Press, 2005.
- [ van Hentenryck1989]
- P. van Hentenryck. Constraint Satisfaction in Logic Programming. MIT Press, 1989.
- [ Vasquez and Dupont2002]
- M. Vasquez and A. Dupont. Filtrage par arc-consistance et recherche tabou pour l’allocation de fréquence avec polarisation. In Actes des JNPC 2002, 2002.
- [ Vilain and Kautz1986]
- M. Vilain and H. Kautz. Constraint propagation algorithms for temporal reasoning. In Proceedings of AAAI-86, Philadelphia, Pa., pages 377-382. AAAI, August 1986.
- [ Waltz1975]
- D.L. Waltz. The Psychology of Computer Vision, chapter Generating Semantic Descriptions from Drawings of Scenes with Shadows. Mc Graw Hill, 1975.
- [ Woodruff1999]
- D. L. Woodruff. A chunking based selection strategy for integrating meta-heuristics with branch and bound. In Metaheuristics: Advances and Trends in Local Search Paradigms for Optimization, pages 499-511. Kluwer Academic Publishers, 1999.
- [ Yato and Seta2002]
- T. Yato and T. Seta. Complexity and Completeness of Finding Another Solution and its Application to Puzzles. In Proc. of the National Meeting of the Information Processing Society of Japan IPSJ SIG Notes 2002-AL-87-2, 2002.
Hybridation de méthodes complètes et incomplètes pour la résolution de CSP
Résumé
|
L’hybridation des mécanismes de méthodes incomplètes et des
techniques de programmation par contraintes est souvent basée sur
des combinaisons de type maître-esclave, dédiées à la résolution
de classes de problèmes spécifiques. Dans cette thèse, nous nous
intéressons à la définition d’un modèle théorique uniforme, basé
sur les itérations chaotiques de K.R. Apt qui définissent un cadre
mathématique pour l’itération d’un ensemble fini de fonctions sur
des domaines abstraits munis d’un ordre partiel. Ce cadre permet
de prendre en compte une hybridation entre les méthodes
incomplètes et les méthodes complètes. Dans ce contexte, la
résolution s’apparente à un calcul de point fixe d’un ensemble de
fonctions de réductions spécifiques. Notre cadre générique permet
alors d’envisager des stratégies de combinaisons et d’hybridation
de manière plus fine et d’étudier leurs propriétés. Nous avons
employé un cadre général approprié pour modéliser la résolution
des problèmes d’optimisation et nous présentons des résultats
expérimentaux qui mettent en avant les atouts de telles
combinaisons en regard d’une utilisation indépendante des
techniques de résolution.
Mots-clés : CSP, recherche locale, algorithmes génétiques, propagation de contraintes, résolution hybride |
Hybridization of complet and incomplete methods to solve CSP
Abstract
|
Hybridization of incomplete and constraint programming techniques
for solving Constraint Satisfaction Problems is generally
restricted to some kind of master-slave combinations for specific
classes of problems. In this PhD thesis, we are concerned with the
design of a hybrid resolution framework based on K.R. Apt’s
chaotic iterations. In this framework, basic resolution processes
are abstracted by functions over an ordered structure. This allows
us to consider the different resolution agents at a same level and
to study more precisely various strategies for hybridization of
local search, genetic algorithms and constraint propagation.
Hybrid resolution can be achieved as the computation of a fixed
point of some specific reduction functions. Our framework opens up
new and finer possibilities for hybridization/combination
strategies. Our prototype implementation gave experimental results
showing the interest of the model to design such hybridizations.
Keywords: CSP, local search, genetic algorithms, constraint propagation, hybrid resolution |